Mobiiltelefoniga juhitav koerte söötja on lemmikloomade ja loomade söötmissüsteem, mis võimaldab omanikul toitu kaugjuhtimisega täita söötja konteinerisse, ilma et see oleks füüsiliselt kohal.
Selles postituses käsitletakse GSM-moodulit ja Arduino-põhist koerte söötja ahelat. Süsteemi saab kasutada koera söötmise mehhanismi juhtimiseks omaniku mobiiltelefoni kaudu, kui see on vajalik.

Ideed taotles hr Allan Guillermo ühe oma vahendusel kommentaare
Sissejuhatus
Kuigi kõik koduloomaliigid on armastusväärsed, eelistavad koerad lemmikloomadena palju suuremat eelistust, võib-olla tänu nende kõrgele intelligentsusele ja lojaalsusele omaniku suhtes.
Kuid tänapäevase kasvava kirgliku ajakava tõttu seisavad paljud lemmikloomaomanikud silmitsi suurte probleemidega oma lemmikloomade tööajal haldamisel.
Lemmiklooma õigeaegne söötmine muutub kõigi hõivatud lemmikloomaomanike jaoks oluliseks probleemiks. Lemmikloomaomanikud otsivad sageli võimalikku lahendust, mis võib tagada, et nende lemmikloomi ei sunnita kunagi näljasena hoidma ega sööma enneaegselt.
Selle probleemi lahendamiseks võib siin käsitletud idee pakkuda kõigile vajaliku lahenduse kõigile, kes puutuvad kokku eespool nimetatud probleemiga.
Eesmärk
Vooluringi eesmärk on võimaldada kasutajal teada saada, kui anumas olev toit on tühi, ja täita see oma mobiiltelefoni kiire kõne abil.
Selle võimaluse korral ei pea lemmikloomaomanikud kunagi muretsema oma lemmikloomadele õigeaegse toiduga varustamise pärast, isegi kui nad on kodust eemal.
GSM-põhise Arduino süsteemi kasutamine
Selles kontseptsioonis a GSM moodul kasutatakse vastuvõtjana, mis võtab vastu omaniku mobiiltelefonilt käsu praktilise toimingu teostamiseks, ja ka saadab SMS-i alati, kui asjakohane probleem avastatakse.
Süsteemi ehitamiseks vajame järgmisi seadmeid:
1) GSM moodul
2) Arduino tahvel
3) Mõned elektroonilised varuosad
4) mootorimehhanism
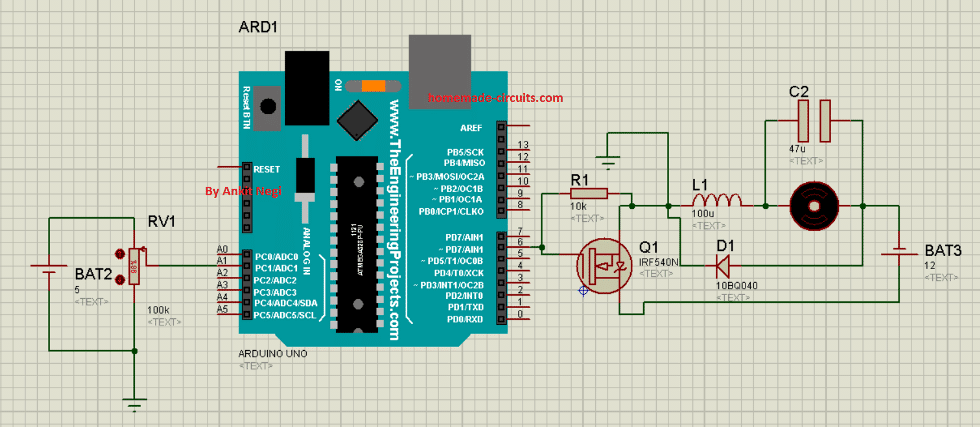
Vooluringi skeem

GSM-vastuvõtja etapi loomine
Ülaltoodud diagramm näitab GSM-vastuvõtja vooluahelat, kasutades GSM-moodulit ja Arduino UNO juhatus.
Selle disaini ülesanne on saada käsk omanikelt mobiiltelefonilt ja kasutage lisatud relee.
Relee lülitab lõpuks sisse mootorimehhanismi või solenoidi koera söötja kavandatud toimingu sooritamiseks.
Seadistamine tundub üsna mõistetav, välja arvatud pilliroo relee kaasamine.
Pilliroo relee võetakse kasutusele koeratoidu olemasolu või puudumise tuvastamiseks antud konteineris.
Kuidas Reedi relee peaks olema korraldatud
Pillireleed kasutatakse + 5V (kõrge) või 0V (LOW) signaali käivitamiseks Arduino # 7 kinnitamiseks. Seejärel palub see signaal Arduinol GSM-mooduli kaudu saata omaniku mobiiltelefonile tekstsõnum.
Nii saab omanik teada konteineris oleva toidu olukorrast, olgu see siis täidetud või tühi. Selles olukorras saadab omanik oma mobiiltelefoni kaudu kiiresti käsu GSM-moodulile, et käivitada toitesüsteem, nii et see täidaks uuesti konteineri toiduga.
Pilliroo relee töö võimaldamiseks tuleb koeratoidu konteinerit muuta nii, et see oleks toiduga laadituna umbes cm võrra alla või alla vajutatud. Ja liigub koorma või toidu puudumisel üles või kallutab üles.
Kallutatavale küljele sisestatud väike magnet tuleb pilliroo relee lähedale, kui konteiner laaditakse, ja eemaldub, kui konteiner on tühi.
Sõltuvalt ülaltoodud olukordadest saadab pilliroo relee Arduino tihvtile nr 7 positiivse või negatiivse signaali, kutsudes teda saatma omanikule tekstisõnumi.
Kuidas mootorimehhanism võib töötada
Mootorimehhanismi võiks paigutada nii, et selle aktiveerimisel avab vedruga mehhanismi surudes etteandeukse.
Selle aja jooksul hakkab söötja kauss täituma ja selle kaal põhjustab lõpuks pilliroo relee Arduinole positiivse signaali.
Kui see juhtub, küsitakse omanikult kiiret tekstisõnumit, milles kinnitatakse toidunõu täitmist.
Siinkohal peab kasutaja saatma uue kõne Arduino GSM-ile, nii et solenoid või mootori mehhanism taastub algsesse olekusse, sulgedes sööturi ukse.
Eespool selgitatud mootori mehhanismi ja pilliroo relee paigutust saab vastavalt kasutaja mugavusele ja sobivusele kohandada mitmel erineval viisil.
Programmi kood:
Programmi kood on sama, mida on kirjeldatud järgmises artiklis.
Kasutage järgmise artikli alumises osas selgitatud koodi, mitte esimest.
https://www.elprocus.com/2016/11/gsm-pump-motor-controller-using-arduino.html
Eelmine: Arduino põhiprogrammeerimise õppimine - õpetus uustulnukatele Järgmine: Pooljuhtide õppimise alused