
CAN ehk Controller Area Network on kahe juhtmega pooldupleksne kiire jadavõrgu tehnoloogia. Seda kasutatakse põhimõtteliselt väikese raadiusega piirkonnas erinevate seadmete vahelises suhtluses, näiteks autos. CAN-protokoll on CSMA-CD / ASM-protokoll või kandjataheline mitme juurdepääsuga kokkupõrke tuvastamise arbitraaž sõnumi prioriteedi protokollis. CSMA tagab, et iga sõlm peab enne sõnumi saatmist ootama teatud perioodi. Kokkupõrke tuvastamine tagab kokkupõrke vältimise, valides sõnumid nende ettenähtud prioriteedi alusel.
See tagab signaalimiskiiruse vahemikus 125 kbps kuni 1 Mbps. See näeb ette 2048 erinevat sõnumi identifikaatorit.
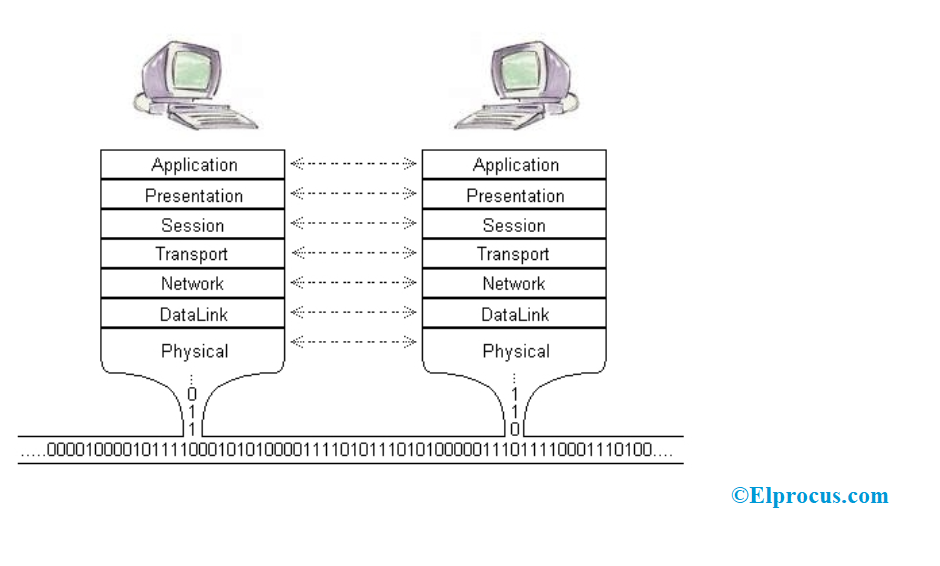
See on ISO-11898 standard ja kasutab 7-kihilist avatud süsteemide ühendamise mudelit.
Ajalugu:
Selle töötas välja Robert Bosch 1982. aastal ja ametlikult andis välja Detroiti Automootorite Selts 1986. Esimese CAN-bussi integreeriva auto valmistas Mercedes Benz 1992. aastal.
ISO 11898 arhitektuur:

Pildi allikas - theremino
Kihiline arhitektuur koosneb kolmest kihist
- Rakenduskiht : See suhtleb operatsioonisüsteemi või CAN-seadme rakendusega.
- Andmelingi kiht : See ühendab tegelikud andmed protokolliga andmete saatmise, vastuvõtmise ja kinnitamise osas.
- Füüsiline kiht : See tähistab tegelikku riistvara.
Standardne CAN-raam koosneb järgmistest bittidest:
 Standardne CAN-raam koosneb järgmistest bittidest:
Standardne CAN-raam koosneb järgmistest bittidest:
- SOF- Fr. Algus ame. Sõnum algab sellest punktist.
- Tuvastage : See otsustab sõnumi prioriteedi. Madalam kahendväärtus, suurem on prioriteet. See on 11-bitine.
- RTR - kaugedastuse taotlus. See on domineeriv, kui teavet nõutakse teiselt sõlmelt. Kõik sõlmed saavad päringu vastu, kuid nõutav on ainult see sõlm, mille identifikaator sobib sõnumi omaga. Iga sõlm saab ka vastuse.z
- SIIN - ühe identifitseerimise laiendus. Kui see on domineeriv, tähendab see, et edastatakse standardset laiendita CAN-identifikaatorit.
- R0 - reserveeritud natuke.
- DLC - Andmete pikkuse kood. See määratleb saadetavate andmete pikkuse. See on 4-bitine
- Andmed - Edastada saab kuni 64-bitiseid andmeid.
- CRC - tsükliline koondamise kontroll. See sisaldab eelmiste rakenduste andmete kontrollsummat (edastatud bittide arvu) vigade tuvastamiseks.
- ALAS - Tunnusta. See on 2-bitine. See on domineeriv, kui saabub täpne sõnum.
- EOF - kaadri ots. See tähistab purgi raami lõppu ja keelab bittide täitmise.
- IFS - Raamidevaheline ruum. See sisaldab aega, mis kontrolleril kulub õigesti vastuvõetud kaadri õigesse asendisse viimiseks.
5 erinevat tüüpi teateid on:
- Andmeraam : See koosneb suvalisest väljast, andmeväljast, CRC-väljast ja kinnitusväljadest.
- Kaugraam : Taotleb andmete edastamist teisest sõlmest. Siin on RTR-bit retsessiivne.
- Vearaam : See edastatakse vea avastamisel.
- Raami ülekoormus : Seda kasutatakse viivituse pakkumiseks sõnumite vahel. See edastatakse siis, kui sõlmed muutuvad liiga hõivatud.
- Kehtiv raam : Sõnum on kehtiv, kui EOF-väli on retsessiivne. Muul juhul edastatakse teade uuesti.
CAN füüsiline kiht:
CAN-buss

Pildi allikas - digital.ni
See koosneb kahe juhtmega jadalingist - CAN_H ja CAN_L ning nende pingetasemed üksteise suhtes määravad, kas edastatakse 1 või 0. See on diferentsiaalne signaalimine. Igas signaaliliinis voolav vool on võrdne, kuid vastupidises suunas, mille tulemuseks on välja tühistav efekt, mis on madala müraemissiooni võti. See tagab tasakaalustatud diferentsiaalse signaalimise, mis vähendab müra sidumist ja võimaldab juhtmete kaudu kiiret edastamist. Tavaliselt on juhtmeteks keerdpaarkaablid, mille siini pikkus on 40 m ja maksimaalselt 30 sõlme. See on varjestatud või varjestamata kaabel, mille iseloomulik takistus on 120 oomi.
SAAB SAADA:

CAN sõidukitele Hugo Provencher. Kaks juhtmest CANH ja CANL on tavaliselt 2,5 V, mille määravad kaks transistorit ja 2,5 V pingeallikas. Põhimõtteliselt peaks kahe juhtme vahe olema alati 0. Juhi juht määrab CANH ja CANL juhtmetele rakendatava pinge. Kui mõlemad transistorid juhivad, langeb pinge üle 1sttransistor ja diood on 1,5 V, muutes CANH-traadi kuni 3,5 V-ni. Pinge langus üle 2ndtransistor ja diood on 1 V, mistõttu CANL-traat tõmbub alla 1,5 V-ni. Dioode kasutatakse kõrgepingekaitseks. Vastuvõtja on diskrimineeriv vooluring, mis annab väljundiks 1, kui kaks sisendit CANH ja CANL on samad, ja väljundiks 0, kui kaks sisendit on erinevad. TXD domineerivat plokki kasutatakse maandusvigade kaitseks ja termilise seiskamise plokk blokeerib juhi juhtimise, kui dioodid ja transistorid ülekuumenevad.
CAN-i eelised:
- See vähendab juhtmeid, kuna see on hajutatud juhtimine ja see tagab süsteemi jõudluse.
- Paljud CAN-kiibitootjad pakkusid andmesidekihti ja kiibiga liidetud füüsilist kihti ning tarkvara arendaja peab tegema ainult rakenduse kodeerimise.
- See annab võimaluse töötada erinevates elektrikeskkondades ja tagab müravaba ülekande.
- Liiklusummikud kõrvaldatakse, kuna sõnumeid edastatakse nende prioriteedi alusel ja see võimaldab kogu võrgul täita ajapiiranguid.
- See näeb ette tõrgeteta edastamise, kuna iga sõlm saab sõnumi edastamise ajal vigu kontrollida ja vearaami saata.
CAN-i näide:
Kontrolleripiirkonna võrgul on laialdased rakendused nii tööstuses kui ka sõidukites. Üks peamisi rakendusi on seotud sõiduki erinevate seadmete vahelise suhtlusega. Teine võimalus võib olla erinevate mikrokontrollerite seas. Oletame, et parooli tuvastamiseks kasutatakse mis tahes nõudeid, näiteks lukustatud ukse avamine parooli abil või pirni sisselülitamine jne.

Kontrolleri piirkonna võrguring
Põhirakendus koosneb kolmest mikrokontrollerist, mis suhtlevad omavahel kahe juhtme abil nagu CAN-võrgus. 1stmikrokontroller on ühendatud klaviatuuriga, 2ndvedelkristallekraaniga, kolmas - summeri ja lampiga töötava releega. Kui klaviatuurile sisestatakse parool, kuvatakse 2ndmikrokontroller toimib vastuvõtjana ja võtab edastatud sõnumi ükshaaval vastustsaatja ja kuvab teate LCD-ekraanil. Kui kogu teade on edastatud, kuvatakse 2ndmikrokontroller kontrollib ja kui parool on vale, saadab see signaali 3-lerdmikrokontroller, mis omakorda saadab summeri, lülitatakse selle signaaliga sisse. Kui parool on õige, siis 3rdmikrokontroller lülitab relee sisse, mis omakorda lülitab lampi sisse.





{kind=link}
{kind=link}