Postitus selgitab lihtsat takistust, mis väldib roboti vooluringi ilma mikrokontrollerita ja mootori juhi spetsiaalseid ahelaid või IC-sid kasutamata. Idee soovis hr Faiyyaz
Kujundus
Põhimõtteliselt on see kujul a liikuv sõiduk mis suudab tuvastada ja vältida võimalikke takistusi oma teel ning muuta suunda sobivalt, nii et tema liikumine jääb katkematuks, lihtsaks!
Operatsioon on seega automaatne ilma igasuguse käsitsi või inimese sekkumiseta.
Esitatud idee takistusest, mis väldib robotit ilma mikrokontrollerita, nagu nimigi ütleb, ei kasuta mikrokontrollerit ja on seetõttu ülimalt lihtne üles ehitada ning sobib igale uuele harrastajale.
Vooluringi projekteerimisel mõistsin, et põhimõtte rakendamiseks on vaja vähemalt paari takistusteanduri moodulit, kuna ühe mooduli kasutamine võib põhjustada mootori ebakorrektset liikumist ega pruugi aidata sõiduki sujuvat ümbersuunamist või pööramist vaba tee.
Seadistatud sõiduki mootor on üsna sarnane mootoriga puldiga mänguauto mida olin ühes varasemas postituses arutanud.
Järgmine diagramm kujutab süsteemi üht moodulit ja seetõttu oleks sõiduki paremal ja vasakul küljel vaja kahte või paari sellist moodulit.
Idee on lihtne ja töötab ilma mikrokontrollerita ja ilma spetsiaalsete mootorijuhi IC-deta. See tähendab, et saate seda teha ilma igasuguse kodeerimiseta ja keerulist mootori draiveri IC-d kasutamata ... valmistatud selle vooluringi abil, mida tavaliselt kasutatakse kaubanduskeskustes ja sarnastes jaemüügikohtades.
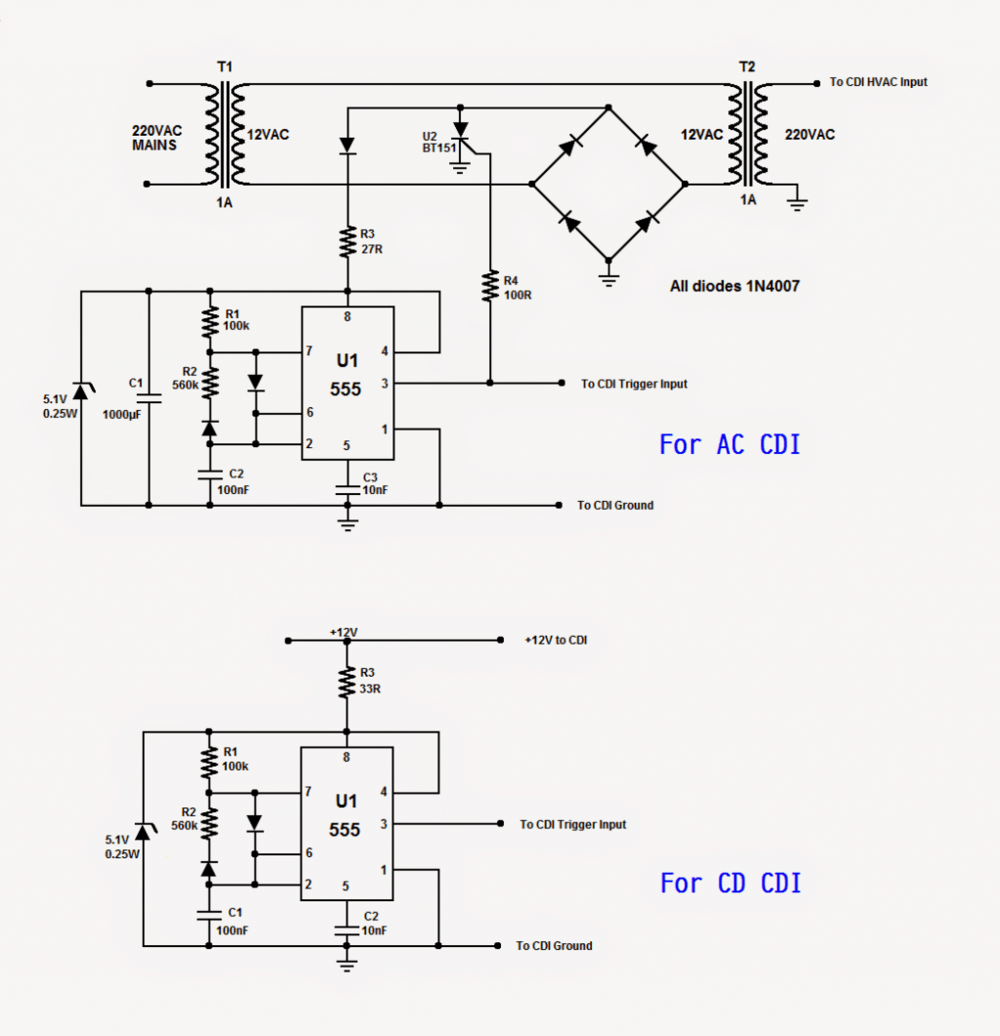
Vooluringi skeem

Nüüd proovime mõista ülaltoodud vooluringi järgmise selgituse abil:
Kuidas see töötab
IC 555 on konfigureeritud IR-saatjana ja on seatud genereerima konstantset 38 kHz sagedust, samas kui külgnev transistoriga vooluahel on konfigureeritud vastuvõtja etapiks või IR anduri etapiks.
Oletame, et see on parempoolne moodul ja oletame, et see moodul on esimene, kes teelt takistuse tuvastab.
Seega, niipea kui takistus on tuvastatud, peegeldub 555 IC poolt genereeritud 38kHz sagedus külgneva vastuvõtjaahela anduri suunas.
Vastuvõtja aktiveerib koheselt seotud transistorid nii, et lõpliku draiveri transistori juhtimine on takistatud.
Nüüd peaks selle transistori juhitav mootor asuma sõiduki vasakul küljel, see on selle mooduli vastasküljel ... samamoodi juhib paremal küljel asuvat mootorit tegelikult vasakpoolne moodul .
Järelikult, kui ülaltoodud eeldatav parempoolne takistuste detektorimoodul aktiveerub, peatab see vasaku käe mootori, samal ajal kui parempoolsel mootoril lastakse normaalselt liikuda.
Selle olukorra tõttu on sõiduk sunnitud vasakule küljele suunama ... mis tähendab, et oletatav vasak moodul hakkab saama veelgi tugevamaid takistussignaale ja sunnib sõidukit käimasoleval ümbersõidul rohkem edasi minema, kuni see on takistuse täielikult vältinud . Nüüd lõpetab moodul takistussignaalide vastuvõtmise ja sõiduk hakkab oma uuel rajal tavapäraselt edasi liikuma.
Kui ülaltoodud ümbersuunamine viiakse läbi, on vasakpoolne moodul sunnitud üha enam isoleerima ja takistusest eemale, et see ei võimaldaks protseduuri sekkuda ja võimaldaks sõiduki puhast ja sujuvat ümbersuunamist.
Täpselt samu protseduure rakendatakse juhul, kui vasakpoolne moodul juhtub tajuma parempoolse mooduli ees olevat takistust, kusjuures sõiduk on sunnitud parema külje suunas üha tugevamalt liikuma.
Samuti näeme moodulis 'blokeerivat' vooluringi etappi, mis on omavahel ühendatud vasaku ja parema külje moodulitega. Selle etapiga tutvustatakse tahtlikult, et mõlemat moodulit kunagi koos ei aktiveerita.
Näiteks kui vasakpoolne moodul saab esimesena takistuse tuvastada, blokeerib see kohe parempoolse mooduli ja algatab sõiduki ümbersuunamise paremale ja vastupidi.
Anduri IC võiks olla standard TSOP17XX seeria
Lisateavet ülaltoodud anduri IC kohta saate õppida kuidas ühendada TSOP1738 IC
Ja mootor peaks olema varustatud käigukastidega, nii et liikumine püsiks algselt kontrollitud tasemel.
Ratta seadistamine
Vasaku ja parema mooduli täielikku seadistamist ja sellega seotud elektriühendusi on näha alloleval joonisel:

Uuenda
Veidi mõtlemist ütleb meile, et ülaltoodud lihtsat takistust robotite voolu vältimisest saab rakendada ka kahe mooduli asemel ühe mooduli abil.
Kuid üks moodul võimaldaks sõidukil iga takistuse tuvastamise korral teha ühepoolse ümbersuunamise, seetõttu saab süsteemi konfigureerida nii päripäeva kui ka vastupäeva, sõltuvalt sellest, milline mootor on ahelaga toiminguteks ühendatud.
Seadistatud näidet saab visualiseerida järgmisel pildil:

Siiski näib, et ülaltoodud ühe mootori seadistamisel on üks probleem. Kui oletame, et sõiduk satub vasakule küljele täisnurga alla. See sunnib sõidukit edasi liikuma vastupäeva, kuni see teeb tagasipöörde ja hakkab tagasi liikuma sama suuna suunas, kust see algas. Kasutaja ei hindaks seda.
Eelmine: SMD takistid - sissejuhatus ja töö Järgmine: Kuidas kiirendusmõõtur töötab


![Ioondetektori ahel [staatilise laengu detektor]](https://electronics.jf-parede.pt/img/sensors-and-detectors/09/ion-detector-circuit-static-discharge-detector-1.jpg)