Artikli selles osas saame teada uuendusliku meetodi kohta, kuidas elektrisõidukites olev pedaalivajutusmehhanism muundada vastavalt varieeruvaks elektrisignaaliks, mida võib veelgi kasutada sõiduki kiiruse reguleerimiseks.
Selgitatud kontseptsioon töötab nagu elektrooniline gaasipedaal, mis suurendab sõiduki kiirust lineaarselt, kui pedaali järk-järgult vajutada, ja vastupidi, kasutades PWM-tehnoloogiat
Idee soovis hr Lokesh Maini
Tehnilised kirjeldused
Olen mehaanik, töötan praegu elektrisõiduki kallal ja tahan pedaali abil mootori kiirust reguleerida. ma ei saa oma mootori jaoks kontrollerit, palun aidake mul omaenda üles ehitada, ma olen väga hea
tänulik
Mootori spetsifikatsioonid on 36volt, 43amp ja 1,5hj harjatud alalisvoolumootor.
Mehaaniline disain
Pedaalikiirendi elektrooniline versioon nõuab peamiselt mehhanismi, et pedaali mehaaniline vajutamine muundada kõigepealt vastavalt muutuvaks elektrisignaaliks, nii et seda signaali saab töödelda läbi signaaliprotsessori etapi soovitud muundamiseks kiiruse praktiliseks juhtimiseks. sõiduk.
Paljusid kontseptsioone saab proovida, näiteks pieso koormusanduri, mahtuvusliku koormusanduri, resonantsanduri vms abil. Selles artiklis õpime tunduvalt lihtsamat minu väljatöötatud meetodit, mis sisaldab LED / LDR komplekti sama saavutamiseks .

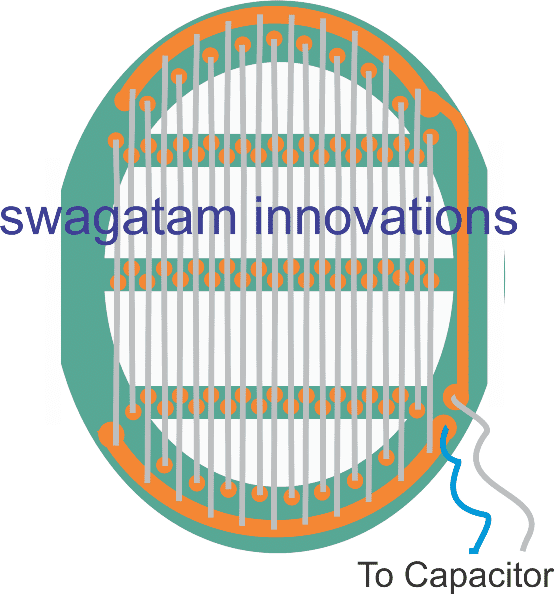
Ülaltoodud joonisel näidatud elektromehaanilises paigutuses näeme järgmisi integreeritud komponente:
Kruvimehhanismiga kinnitatud väike käik.
Valge mattpeegelduspinnaga kruvipea
LED / LDR komplekt, mis on paigutatud kruvipea ette.
Kuidas kavandatav mehhanism töötab.
Ülaltoodud joonisel näidatud käik tuleb lukustada teise käiguga, mille suhe võib olla kümme korda suurem kui see käik.
Suurem käik tuleb konfigureerida pedaalimehhanismiga nii, et see käivitaks pöörde liikumise vastusena pedaali vajutamisele.
Hammasrataste pöörlemisreaktsioon tekitab omakorda kruvipea liikumise edasi kambrisse, kus asub LED / LDR komplekt.
Protsess põhjustab LDR-le proportsionaalselt erineva hulga LED-st peegeldunud valguse vastuvõtmise.
Need erinevad andmed (muutuva takistuse kujul), mis vastavad pedaali vajutusele, saab seejärel suunata signaaliprotsessori ahelasse, et rakendada konkreetse sõiduki kavandatud kiiruse reguleerimist.
Aastal järgmine postitus õpime signaaliprotsessori etappi, kasutades PWM-tehnikat.
Aastal ülalolevas jaotises saime teada lihtsast elektromehaanilise muunduri komplektist pedaali tegevuse muundamiseks proportsionaalselt muutuvaks elektrisignaaliks.
Pedaali tegevuse teisendamine PWM-iks
Uurime nüüd vooluringi teostust, mis võimaldab meil pedaali elektrisignaali teisendada vastavalt varieeruvaks PWM-signaaliks sõiduki ettenähtud mootori kiiruse reguleerimiseks.

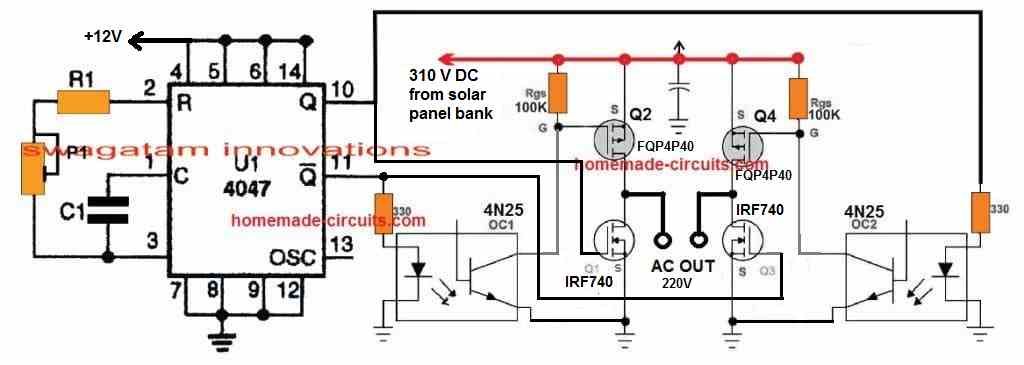
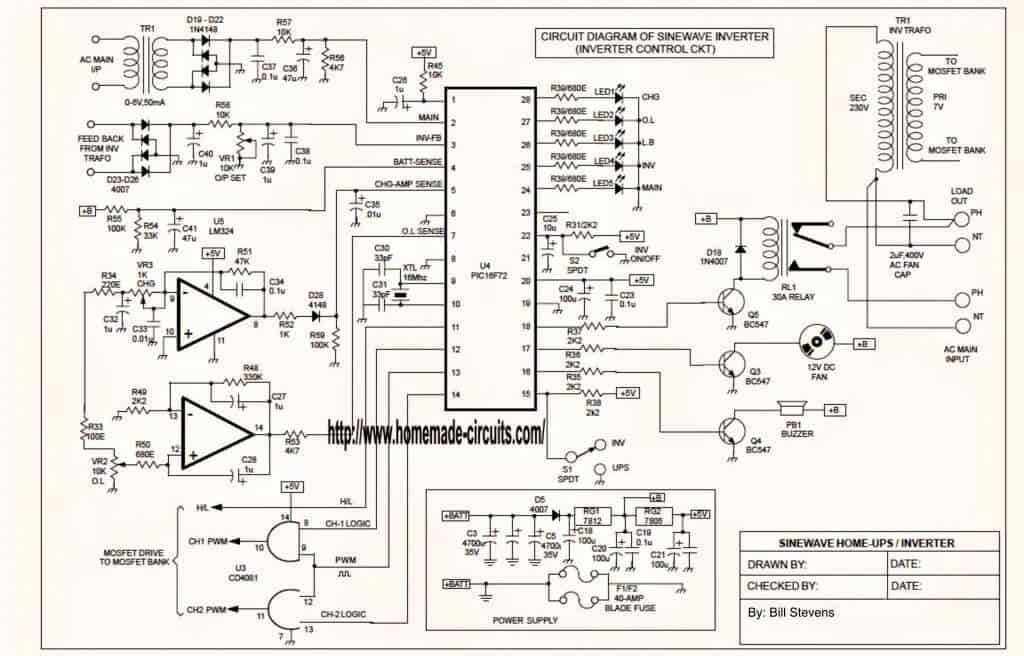
Eespool toodud skeemile viidates saame skeemi tööd hinnata järgmiste punktide abil:
IC1 on konfigureeritud kui 80Hz impulsigeneraator, mille töötsüklina on maksimaalne sisse- ja väljalülitusaeg
IC2 on võrdlusalus, mis teisendab kõigepealt oma pin2-l rakendatud ülaltoodud 80Hz impulsi pin6-s tekitatud kolmnurga lainetega ja võrdleb kolmnurga laineid selle pin5-s oleva moduleeriva pingega.
Pin5 moduleeriv pinge saadakse BJT BC547 emitterist, mis on konfigureeritud ühiseks kollektoriks, mille alus on ühendatud pedaali toimel saavutatud LDR sisenditega.
Varieeruvaid takistusi vastusena pedaali vajutamisele võrreldakse 100K eelseadistatud seadistusega ja transistori põhjas töötatakse välja proportsionaalne pinge suurus, mis muundab väikese voolu sisendi ekvivalentseks kõrge voolu signaaliks IC2 pin5 kaudu.
Selle hetkepotentsiaali taseme aktsepteerib ja töötleb IC2, genereerides PWM-signaalide proportsionaalse suuruse mosfeti ja ühendatud mootori jaoks.
Seega reguleeritakse mootori pöörlemiskiirust ja seda muudetakse vastavalt kõikuvatele PWM-idele vastusena sõiduki pedaalide vajutustele.
Ülaltoodud protseduurid muudavad pedaali toimimise sõiduki mootori ja selle kiiruse kontrollitud toiminguteks.
Kuidas seadistada vooluringi.
See on väga lihtne.
- Vajutage pedaal maksimaalsesse punkti nii, et kruvipea jõuaks LED / LDR-sõlme ees võimalikult lähimasse asendisse.
- Järgmisena reguleerige 100 k eelseadistust, kuni IC2 pin3 hakkab genereerima maksimaalse laiusega PWM-e. Seda saab kinnitada, mõõtes pin3 pinget nii, et see oleks võimalikult lähedal vooluahela toitepingele, see tähendab 5V.
- Kui see on tehtud, võib eeldada, et seadistamisprotseduur on täielik.
- Tulemusi saab nüüd kontrollida, vajutades pedaali erinevatel tasanditel ja kontrollides, kas mootori kiirus varieerub samal viisil.
Eelmine: Lihtne ESR-arvesti ahel Järgmine: Kuidas ehitada kasvavat valgusahelat