Sissejuhatus
Ühefaasilisi asünkroonmootoreid kasutatakse laialdaselt seadmetes ja tööstuslikes juhtimisseadmetes. Püsiva jagatud kondensaatori (PSC) ühefaasiline induktsioonmootor on seda tüüpi lihtsaim ja enimkasutatav mootor.
Konstruktsiooni järgi on PSC mootorid ühesuunalised, mis tähendab, et need on mõeldud pöörlema ühes suunas. Lisades kas lisamähised, välised releed ja lülitid või kasutades ülekandemehhanisme, saab pöörlemissuunda muuta. Selles idees arutleme üksikasjalikult, kuidas juhtida PSC mootori kiirust mõlemas suunas, kasutades mikrokontrollerit PIC16F72 ja jõuelektroonikat.
Mikrokontroller PIC16F72 valiti seetõttu, et see on üks lihtsamaid ja odavaid üldotstarbelisi mikrokontrollereid, mida Microchip oma portfellis on. Isegi kui sellel pole riistvaras olevaid PWM-e täiendavate PWM-väljundite juhtimiseks koos sisestatud surnud ribaga, genereeritakse kõik PWM-id püsivara abil, kasutades taimereid ja väljastades üldotstarbelistele väljundnõeltele.
Mis on muutuva sagedusega ajam?
Muutuva sagedusega ajam ehk VFD on viis, mis võimaldab reguleerida asünkroonmootori pöörlemissagedust muutuva vahelduvvoolu toitepinge abil. Väljuva vahelduvvoolu sageduse juhtimisega on võimalik mootorit juhtida erineva kiirusega, lähtudes nõuetest. Need on reguleeritava kiirusega ajamid, mida kasutatakse peamiselt tööstuslikes rakendustes nagu pumbad, ventilatsioonisüsteemid, liftid, tööpinkide ajamid jne. See on sisuliselt energiasäästlik süsteem. Seetõttu on esimene nõue luua erineva sagedusega siinuslaine VFD jaoks.
Mis on VFD-s kasutusele võetud tehnoloogia?
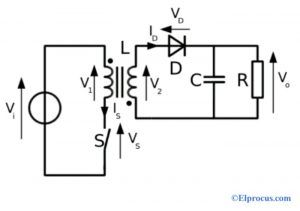
See on süsteem, mis annab vahelduvvoolu väljundi erineva sagedusega, et juhtida mootori kiirust vastavalt vajadustele. Ühefaasilised muutuva sagedusega muundurid on levinumad, kuna enamik seadmeid töötab ühefaasilise vahelduvvoolu toites. See koosneb täislainega sillaalaldist 230/110 V vahelduvvoolu muundamiseks ligikaudu 300/150 voldiseks alalisvooluks. Silla alaldi väljundvoolu tasandatakse vahelduvvoolu lainete eemaldamiseks suure väärtusega silumiskondensaatoriga. See fikseeritud pinge alalisvool suunatakse seejärel sagedust genereerivasse vooluahelasse, mis on moodustatud MOSFET (metallioksiidiväljatransistor) / IGBT (isoleeritud värava bipolaarne transistor) transistoridest. See MOSFET / IGBT vooluring võtab vastu alalisvoolu ja muundab selle seadme kiiruse reguleerimiseks muutuva sagedusega vahelduvvooluks.
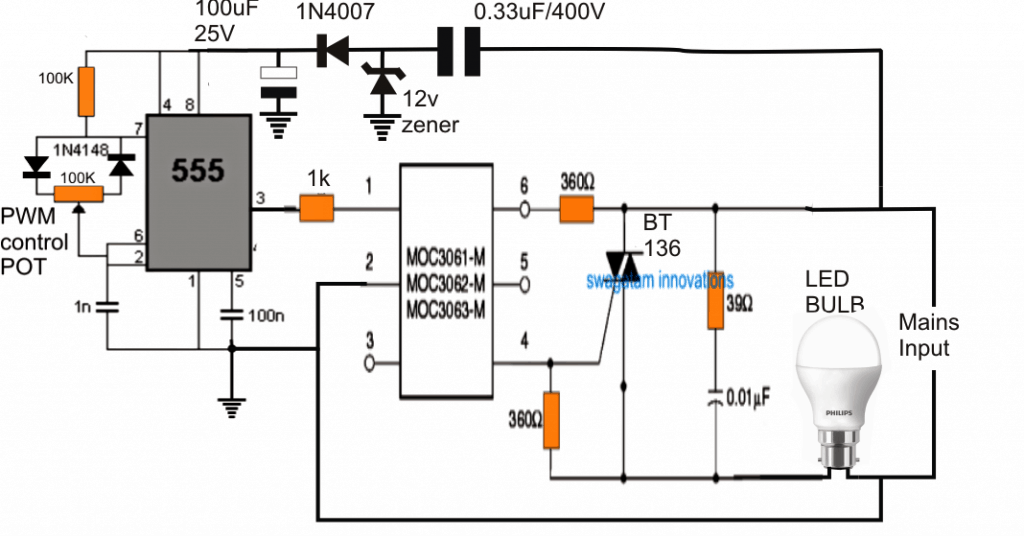
Sageduse muutust saab saavutada elektrooniliste ahelate või mikrokontrolleri abil. See vooluahel muudab pinge (PWM) sagedust, mida rakendatakse MOSFET / IGBT vooluahela väravaseadmele. Seega ilmub väljundisse erineva sagedusega vahelduvvoolu pinge. Mikrokontrollerit saab programmeerida muutma väljundi sagedust vastavalt vajadustele.
VFD-süsteem:
Muutuva sagedusega seadmel on kolm osa, nagu vahelduvvoolumootor, kontroller ja tööliides.
VFD-s kasutatav vahelduvvoolumootor on tavaliselt ühefaasiline kolmefaasiline asünkroonmootor mootor kasutatakse mõnes süsteemis. Üldiselt kasutatakse fikseeritud kiirusega töötamiseks mõeldud mootoreid, kuid mõned mootorikonstruktsioonid pakuvad VFD-s paremat jõudlust kui tavaline konstruktsioon.
Juhtseadme osa on tahke elektroonilise toitemuunduri vooluahel, mis muundab vahelduvvoolu alalisvooluks ja seejärel peaaegu siinuslaineks. Esimene osa on vahelduvvoolu muunduri sektsioon, millel on täislaine alaldi sild, tavaliselt kolmefaasiline / ühefaasiline täislainesild. See alalisvoolu vaheühend muundatakse seejärel inverteri lülitusahela abil kvaasi siinuslaineks AC. Siin kasutatakse MOSFET / IGBT transistore alalisvoolu muutmiseks vahelduvvooluks.
Inverter muundab kolmefaasilise mootori juhtimiseks alalisvoolu kolmeks vahelduvvoolu kanaliks. Kontrolleri sektsiooni saab kavandada ka nii, et see annaks parema võimsusteguri, vähem harmoonilisi moonutusi ja madala tundlikkuse vahelduvvoolu sisendi transientide suhtes.
Volti / Hz juhtimine:
Regulaatori vooluahel reguleerib mootori tarnitava vahelduvvoolu sagedust volti hertsis juhtimismeetodi kaudu. Vahelduvvoolumootor nõuab muutuvat rakendatavat pinget, kui sagedus muutub määratud pöördemomendi saamiseks. Näiteks kui mootor on kavandatud töötama 440 volti juures 50 Hz juures, siis tuleb mootorile rakendatav vahelduvvool vähendada poole võrra (220 volti), kui sagedus muutub pooleks (25 Hz). See määrus põhineb voltidel / Hz. Ülaltoodud juhul on suhe 440/50 = 8,8 V / Hz.
 Muud pinge reguleerimise meetodid:
Muud pinge reguleerimise meetodid:
 Muud pinge reguleerimise meetodid:
Muud pinge reguleerimise meetodid:Lisaks volti / Hz juhtimisele saavad kasutada ka täiustatud meetodeid, nagu otsene pöördemomendi juhtimine või DTC, Kosmosevektori impulsi laiuse modulatsioon (SVPWM) , jne kasutatakse ka mootori kiiruse reguleerimiseks. Mootori pinge juhtimisega saab magnetvoo ja pöördemomenti täpselt juhtida. PWM-meetodil tekitavad inverterlülitid kvaasi siinuslaine läbi kitsaste impulsside seeria, mille impulsside kestus on Pseudo sinusoidne.
Tööliides:
See jaotis võimaldab kasutajal mootorit käivitada / peatada ja kiirust reguleerida. Muud võimalused hõlmavad mootori tagurdamist, käsitsi ja automaatse kiiruse juhtimise vahel ümberlülitamist jne. Tööliides koosneb ekraanist või indikaatoritest koosnevast paneelist ja mõõturitest, mis näitavad mootori kiirust, rakendatud pinget jne. süsteemi juhtimiseks.
Sisseehitatud - pehme algus:
Tavalises asünkroonmootoris, mis lülitatakse sisse vahelduvvoolulüliti abil, on tõmmatud vool nimiväärtusest palju suurem ja võib suureneda koormuse suurenenud kiirendusega, et saavutada mootori täispööret.
Teisest küljest rakendatakse VFD-juhitavas mootoris madalal sagedusel madalat pinget. See sagedus ja pinge suurenevad kontrollitud kiirusega koormuse kiirendamiseks. See arendab peaaegu rohkem pöördemomenti kui mootori nimiväärtus.
VFD mootori kommutatsioon :
Sagedus ja rakendatud pinge vähendatakse kõigepealt kontrollitud tasemele ja seejärel hoitakse langust, kuni see muutub nulliks ja mootor seiskub.
Rakendusahel ühefaasilise asünkroonmootori kiiruse reguleerimiseks
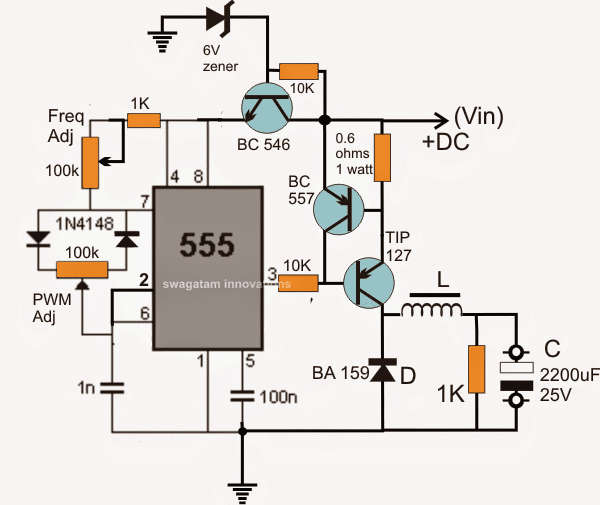
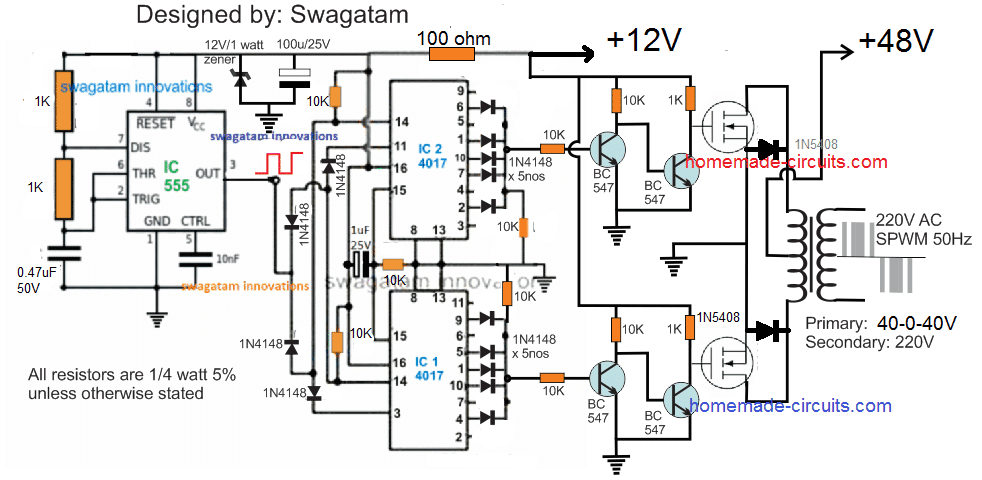
Toiteahelat ja juhtimisahelat käsitlev lähenemine on suhteliselt lihtne. Sisendpoolel kasutatakse pinge kahekordistajaid ja väljundpoolel H-silda või kahefaasilist inverterit, nagu on näidatud joonisel 2. Peamise ja alustava mähise üks ots on ühendatud iga poolsilla külge ja teised otsad on ühendatud vahelduvvoolu toiteallika neutraalpunktiga.
Juhtimisahelaks on vaja nelja PWM-i, millel on kaks komplementaarset paari ja komplementaarsete väljundite vahel on piisavalt surnud riba. PWM-i surnud ribad on PWM0-PWM1 ja PWM2-PWM3. PIC16F72-l pole riistvaras kavandatud PWM-e, et väljastada meile vajalikku viisi. VF puhul sünteesitakse alalisvoolusiin sageduse ja amplituudi muutmisega. See annab kaks siinuspinget faasiväliselt.
Kui peamähisele rakendatav pinge jääb stardimähisest 90 kraadi kaugemale, töötab mootor ühes (st edasi) suunas. Kui me tahame muuta pöörlemissuunda, peab algmähise läbiviimiseks põhimähisele rakendatav pinge.
Loodan, et teil on ülaltoodud artiklist idee asünkroonmootori muutuva sagedusega ajami kohta. nii et kui teil on küsimusi selle kontseptsiooni või elektri- ja elektrooniline projekt palun jätke kommentaaride jaotis allpool.


![Kontaktivaba vahelduvvoolu faasidetektori ahel [testitud]](https://electronics.jf-parede.pt/img/sensors-detectors/38/non-contact-ac-phase-detector-circuit.png)