
PIR-liikumisanduri häire on seade, mis tuvastab liikuva inimkeha infrapunakiirguse ja käivitab helisignaali.
Postitus käsitleb 4 lihtsat liikumisanduri ahelat, kasutades op-võimendit ja transistorit. Arutame ka tavalise passiivse infrapuna (PIR) anduri RE200B kinnitusdetaile.
Me õpime:
- Kuidas PIR-anduriseadet kasutada inimese keha infrapuna tuvastamiseks.
- PIR-mooduli kasutamine a Valvesignalisatsiooni signalisatsioon
- Kuidas kasutada PIR-i tulede sisselülitamiseks, kui tuvastatakse inimese kohalolek.
- PIR-i rakendamine objekti tuvastamiseks tööstuslikes rakendustes
Esimene skeem kasutab op-võimendit, teine konstruktsioon töötab ühe transistori ja releega liikuva inimkeha IR-kiirguse tuvastamiseks ja releega aktiveeritud alarmi aktiveerimiseks.
Mis on PIR
PIR on passiivse infrapuna lühend. Termin „passiivne” näitab, et andur ei osale protsessis aktiivselt, see tähendab, et see ise ei luba nimetatud infrapunasignaale, pigem tuvastab passiivselt läheduses asuva soojaverelise looma infrapunakiirgust.
Tuvastatud kiirgused muundatakse elektrilaenguks, mis on proportsionaalne tuvastatud kiirgustasemega. Seejärel suurendab seda laengut sisseehitatud FET ja see suunatakse seadme väljundtihvlile, mis rakendub välisele vooluahelale edasiseks võimendamiseks ja häireetappide käivitamine .
PIR Pinouti üksikasjad
Pildil on tüüpiline PIR-anduri kinnitusskeem. Pistikute mõistmine on üsna lihtne ja järgmiste punktide abil saab neid hõlpsalt tööahelaks konfigureerida:

Nagu on näidatud järgmisel diagrammil, peaks anduri PIN-kood nr 3 olema ühendatud maapinna või toite negatiivse rööpaga.
Pistik nr 1, mis vastab dvice'i äravooluklemmile, peaks olema ühendatud positiivse toiteallikaga, mis peaks ideaalis olema 5 V alalisvool.
Ja andur 'lähtejuhtmele vastav tihvt nr 2 tuleb ühendada maandusega läbi 47K või 100K takisti. Sellest tihvtist saab ka seadme väljundnõela ja tuvastatud infrapunasignaal edastatakse anduri tihvtilt nr 2 võimendisse.

1) PIR-i inimese liikumise detektori ahel, kasutades Op Amp

Eelmises osas õppisime andmeleht ja tavalise PIR-anduri kinnitused laseme nüüd edasi liikuda ja uurida lihtsat rakendust sama kohta:
Esimene PIR-skeem liikuvate inimeste tuvastamiseks on näidatud eespool. Selgitatavate väljavõtete üksikasjade praktilist rakendamist saab näha siin.
Inimese infrapunakiirguse juuresolekul tuvastab andur kiirgused ja muundab need koheselt minutilisteks elektriimpulssideks, mis on piisav transistori juhtivuseks käivitamiseks, mis muudab selle kollektori madalaks.
The Võrdluseks on loodud IC 741 kus selle tihvt nr 3 on määratud võrdlussisendiks, samas kui tihvt nr 2 sensoorsisendina.
Hetkel, kui transistori kollektor läheb madalaks, muutub 741 IC tihvti # 2 potentsiaal madalamaks kui kontakti # 3 potentsiaal. See muudab IC-i väljundi koheselt kõrgeks, käivitades teisest koosneva relee draiveri etapi BC547 transistor ja relee .
Relee aktiveerib ja lülitab ühendatud alarmseadme sisse.
Kondensaator 100 uF / 25 V tagab, et relee jääb sisselülitatuks ka pärast PIR-i deaktiveerimist, tõenäoliselt kiirgusallika väljumise tõttu.
Eespool käsitletud PIR-seade on tegelikult tuumandur ja võib olla äärmiselt tundlik ja seda on raske optimeerida. Selle tundlikkuse stabiliseerimiseks peaks andur olema sobivalt suletud Fresneli läätsekatte sisse, see suurendab lisaks tuvastamise radiaalset vahemikku.
Kui te pole kindel katmata PIR-seadme kasutamises, võite lihtsalt minna a valmis PIR moodul objektiivi ja muude lisaseadmetega, nagu allpool kirjeldatud.
2) PIR-liikumisandur ja turvahäire
Järgmist PIR-liikumisanduri vooluringi saab hõlpsasti ehitada, kasutades järgmist põhiseadistust ja rakendust a signalisatsioonivargus.

Nagu jooniselt näha, nõuab PIR ainult ühe 1K takisti, transistori ja relee väliseks konfigureerimiseks. Sireen võib olla kas ehitatud kodus või ostetud valmis.
12v toiteallikas võib olla mis tahes tavaline 12V 1 amp SMP vooluring.
Video demo
3) Teine lihtne PIR-põhine häire ahel
Allpool olev kolmas idee selgitab lihtsat PIR-i liikumisanduri häire ahel mida saab kasutada tulede või häiresignaali sisselülitamiseks ainult inimese või sissetungija juuresolekul.
Kuidas see töötab
Siin on lihtne vooluring, mis aktiveerib releealarmi, kui PIR-andur tuvastab elusolendi (inimese). Siin PIR tähistab passiivset infrapunaandurit. See ei tekita infrapunakiirgust tuvastada elusolendi olemasolu kuid teisalt tuvastab see nende poolt vabanevad infrapunakiirgused.

Selles vooluringis kasutatakse HC-SR501 IC-d, mis on vooluahela süda. Esialgu, kui andur tuvastab liikuva objekti, tekitab see väikese signaalpinge (tavaliselt 3,3 volti ), mis juhitakse voolutakisti kaudu transistori BC547 alusele ja selle väljund läheb kõrgeks ning lülitab relee sisse.
Põhjalikuma skeemi saab visualiseerida allpool:

Relee juhtmestik
Selle relee saab konfigureerida kasutamiseks koos elektripirni või torutulega, öölambiga või muuga, mis töötab 220 VAC pingel.
Seda vooluringi kasutatakse enamasti aedades, nii et öösel, kui me läheme aeda jalutama, lülitub vooluring automaatselt valguse sisse ja see jääb põlema seni, kuni oleme anduri läheduses ja see lülitub välja, kui me eemaldume sellest kohast ja seega vähendada elektrikulusid.
Siin on anduri HC-SR501 tagantvaade ...
HC-SR501 kinnitusdetailid

PIR-anduri vaade eest:

Andur koosneb kahest eelseadistatud takistist, mida saab kasutada viivitusaja ja sensatsioonivahemiku juhtimiseks.
Hilinemine potentsiomeeter saab reguleerida, kui kaua valgus jääb põlema.
Andur on ostmisel kaasas vaikerežiimiga 'H', mis tähendab, et vooluring lülitab valguse sisse, kui keegi tsoonis liigub, ja see jääb sisse etteantud ajaks ja pärast etteantud aja möödumist, kui andur suudab endiselt liikumist tuvastada , see ei lülita valgust liikuva märklaua puudumisel välja, vaid lülitab valguse välja.
Siin on anduri HC-SR501 tehnilised üksikasjad
- Tööpinge vahemik: 4,5–12 V DC.
- Praegune äravool:<60uA
- Pinge väljund: 3,3 V TTL
- Tuvastuskaugus: 3 kuni 7 meetrit (saab reguleerida)
- Viivitusaeg: 5 kuni 200 sekundit (saab reguleerida)
PIR-andurite üks puudusi on see, et selle väljund läheb kõrgeks isegi siis, kui rott, koer või mõni muu loom tema ees liigub ja ta süütab asjatult valguse.
Külmades riikides suureneb sensori sensatsioonivahemik. Madala temperatuuri tõttu läbivad inimeste eraldatavad infrapunakiirgused rohkem vahemaid ja põhjustavad seetõttu tulede tarbetut ümberlülitumist.
Kui see on paigaldatud tagahoovidesse, on auto möödumisel võimalus valguse aktiveerimiseks, kuna auto kuuma mootori kiirgused lollitavad andurit.
OSADE NIMEKIRI:
- D1, D2 - 1N4007,
- C1 - 1000uf, 25V,
- 1. kvartal - BC547,
- R1 - 10K,
- R2 - 1K,
- L1 - LED (roheline)
- RY1 - relee 12V
- T1 - trafo 0-12V.

Pärast vooluahela ehituse lõpuleviimist sulgege see sobivasse korpusesse ja kasutage anduri jaoks eraldi korpust ning ühendage andur pikkade juhtmete abil vooluringiga, et saaksite anduri asetada soovitud kohta nagu aias ja vooluringis sees, nii et vooluring oleks ilmastiku eest kaitstud.
Ja ärge unustage relee jaoks kasutada eraldi PCB-d.
Samuti ärge unustage kasutada sobivat relee, millel on õige voolu ja pinge nimiväärtus. Võite kasutada klemmiplokki, mis ühendub relee lülituskontaktidega, ja korraldada see nagu pildil näidatud, nii et saate releekontaktidega ühendatud elektriseadet hõlpsasti vahetada.

Selle anduri kasutamine säästab elektrit suures ulatuses. See võib vähendada ka teie elektriarveid!
'PALUN JÄRGMISEKS TUNDIDEKS JÕUDU!'
Kui ülaltoodud PIR-i liikuva inimese detektori disain on mõeldud kasutamiseks koos alarmi ja laternaga nii, et mõlemad koormused töötavad öösel, kuid häire ainult päeval, võib skeemi muuta järgmisel viisil. Idee pakkus välja hr Manjunath

4) Tööstuslik rakendus
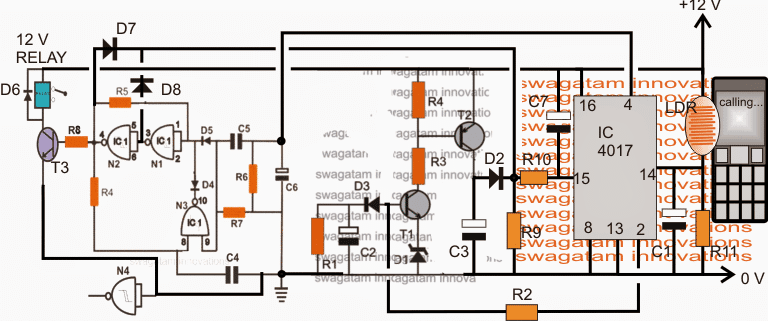
Postitus illustreerib tööstuslikku liikumisandurite ahelat, kasutades paari LDR-i, IC-d ja mõnda muud passiivset komponenti. Vooluring tunnetab silindri liikumist, mis süttib vajaliku tuvastamise jaoks sobivad LED-id. Idee soovis hr Hasnain.
Tehnilised kirjeldused
Ma saatsin teile Google'i kontolt päringu, ma ei ole kindel, et olete minu sõnumid saanud või mitte, nii et ma saadan teile siin oma probleemi uuesti, palun aidake mind, ma olen teile väga tänulik, loodan, et saate minu probleemist aru ja lahenda see ...
härra, see on seotud liikumise tajumisega ja mul pole andurite kohta teadmisi, millist tüüpi ma peaksin kasutama ... probleem: on kaks taset ((tase tähendab kõrgust), taset A ja taset B. kõrgus A> kõrgus Bi tahan andurite kasutamiseks nendel tasanditel, seega ütlen nüüd andurid A ja andur B ..
mul on kaks näidikutuld PUNASEKS ja ROHELISEKS on silinder, mis liigub ülevalt alla ja siis alla üles jne jne. Esiteks liigub see ülevalt alla ja tuleb anduri A ette.
(sel ajal peaks PUNANE valgus põlema ja ROHELINE kustuma) ja allapoole liikuv silinder tuleb anduri B ette.
(see ei tohiks midagi muuta, i, e PUNANE peaks jääma SISSE ja ROHELINE jääma VÄLJA).
siis hakkab silinder ülespoole liikuma, kõigepealt eemaldub see andurist B.
(sel ajal peaks PUNANE välja lülituma ja ROHELINE lülituma SISSE), siis liigub ülespoole suunatud silinder andurist A,
(see ei tohiks midagi muuta. i, e PUNANE peaks jääma VÄLJA ja ROHELINE peaks jääma SISSE) .. siis korrake uuesti.
Vooluring of ign
Kavandatud idee on üsna lihtne ja seda saab mõista järgmiste punktidega:
Kui toide on sisse lülitatud, lähtestatakse mikrolülitus 0,1uF kondensaatori kaudu, tagades, et roheline LED põleb kõigepealt.
Selles asendis suudavad nii andurid sensorA (LDR1) kui ka andurB (LDR2) vastu võtta tuled vastavatelt neile suunatud laserkiirtelt. LDR1 lülitab sisse BC547 transistori, samas kui LDR2 teeb sama BC557 puhul ja hoiab seda käivitatuna.
Ülaltoodud toimingute tõttu edastab transistor BC557 toitepinge IC tihvti # 14. Kuid kuna LDR1 ja BC547 juhivad ka seda potentsiaali, saab see maandatud ja tihvti nr 14 netopotentsiaal jääb loogika madalale või nullile.
Nüüd, kui silinder langeb ja jõuab LDR1 ette, blokeerib see tala, muutes LDR1 takistuse suureks, lülitades BC547 välja.
See võimaldab BC557-st saadud pingel tabada tihvti nr 14, tekitades IC väljundis edasijõudmisjärjestuse, mille tulemusel süttib punane LED ja kustub roheline LED.
Silinder jätkab allapoole liikumist ja satub LDR2 ette, blokeerides selle kiirt ja vähendades selle takistust, see peatab transistori juhtimise nii, et IC tihvti nr 14 potentsiaal lülitatakse uuesti nulli tagasi, kuid see tegevus ei mõjuta IC, kuna see on määratud reageerima ainult positiivsetele impulssidele.
Järgmisena pöörduvad silindrid tagasi ja hakkavad liikuma ülespoole ning blokeerivad selle käigus LDR2 kiirte, võimaldades BC557 juhtida, ja jällegi lastakse transistori positiivsel impulsil lüüa IC tihvti nr 14, mille tulemuseks on eelmise olukorra taastumine, st. nüüd süttib roheline LED ja PUNANE lülitub välja. Kui silinder liigub mööda LDR1, lülitub ka BC547 sisse, kuid ei põhjusta efekti samadel põhjustel, nagu eespool selgitatud.
Ülaltoodud liikumistuvastustsükkel jätkub vastusena silindri kindlaksmääratud liikumisele.
Vooluringi skeem

PIR turvahäire koos viivitusega
Kui PIR käivitatakse, lülitub BC547 sisse, mis omakorda kutsub TIP127 sisse lülitama. Kondensaatori 220uF olemasolu tõttu ei suuda selle PNP-transistori baasemissiooni pinge saavutada vajalikku 0,7 V kiiresti ja LED süttib alles siis, kui 220uF on täielikult laetud.
Kui PIR on välja lülitatud, suudab 220uF 56K takisti kaudu kiiresti tühjeneda, muutes vooluahela kiiresti ooteseisundisse. Diood 1N4148 tagab, et vooluring töötab ainult PIR-lülitusena, mitte viivitusena.

Eelmine: 5 KVA kuni 10 KVA automaatne pinge stabilisaator - 220 volti, 120 volti Järgmine: Kuidas relee töötab - kuidas ühendada N / O, N / C tihvte










{kind=link}