
Surm on midagi paratamatut. Aga kuidas on äkksurmaga lihtsalt mõne liiklusõnnetuse või halvimal juhul - vigastuse tõttu, mis võib inimese elu igaveseks keerata. Kas see ei põhjusta värinat teie selgroolüli, lihtsalt sellele mõeldes? Mis on õnnetuste peamine põhjus? Muidugi hoolimatu juhtimine ja sõidukite kiire sõitmine eriti siledal teel nagu kõrgel teel.
Statistikaaruande kohaselt oli aastatel 2005–2009 umbes 1200 surmajuhtumit lööbe tõttu sõitmise tõttu. Veelgi enam, saate peaaegu iga päev kuulda juhi lööbe tõttu toimunud õnnetuste uudiseid.
Niisiis, kas on kuidagi võimalik seda ära hoida? Muidugi!
Võib olla mitmeid viise, nagu olla hea juht ja järgida liikluseeskirju, säilitada normaalne kiirus. Kuid on üks oluline viis - see on sõiduki kiiruse valvamine ja vastavalt selle jälgimine.
Seda saab teha tehnoloogiliselt, mõeldes välja viisi sõiduki kiiruse kontrollimiseks.
2 viisi kiiruse kontrollimiseks:
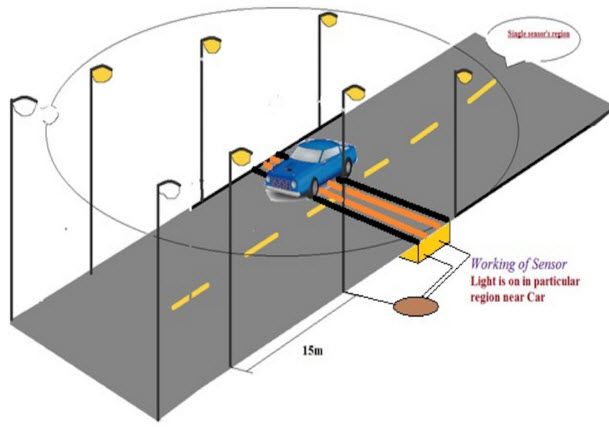
- Kiiruseandurite paigaldamine teepoolele või tee keskele .
- Sisaldab videopildi töötlejaid : See koosneb teeäärte poolustele paigaldatud kaamerast, mis jälgib pidevalt olukorda, pildistades kaadreid järjest. Liiklusvoogude parameetreid analüüsitakse ja töödeldakse vastavalt signaaliprotsessoris.

Videokaamera abil liikluse jälgimise pilt
- RADARi lisamine radadele :RADAR-i saab kasutada sõiduki kiiruse kontrollimiseks, saates mikrolaineahjus sõiduki poole signaali ja analüüsides peegeldunud signaali sageduse muutust. RADAR tähistab raadiotuvastust ja kaugust. Edastatud signaal võib olla püsiva sagedusega või muutuva sagedusega signaal. Tavaliselt on CW Doppler RADAR paigutatud teepoolusele.

Kiiruse tuvastamine RADARi abil
- IR-andurite paigaldamine : IR-andurite kombinatsiooni IR-LED-i ja fotodioodi abil saab jälgida sõiduki läbitud vahemaad ja arvutada samaaegselt selle kiirust. Põhiidee seisneb infrapuna-LED-i ja fotodioodi paari paigutamises sagedaste vahedega mõlemale poole teid ja jälgida IR-LED-i ja fotodioodi vahelise tee katkemist sõiduki poolt.
Siin on ülaltoodud meetodi lihtne prototüüp. Proovi prototüüp töötab kahe IRLED-fotodioodi paariga.

Kiiruse prototüübi kontrollimine IR - anduri abil Edgefx komplektid
See koosneb järgmistest jaotistest:
- Fotodiood - LED paar sõiduki tajumiseks
- Loendur, et arvutada ja kuvada aeg, mis sõidukil kulgeb kahe fotodioodiga juhitava paari vahelise tee ületamiseks.
- Summer, mis näitab, kas kiirus ületab seatud piiri.
- Taimer IC-d signaalide edastamiseks sobival ajastusel.
- LIDAR-relva kasutamine : LIDAR on LASER-põhine tuvastus- ja kaugussüsteem. Liikluspolitseinik saab kanda kaasaskantavat LIDAR-relva, mis saadab lühikese infrapunavalguse ja kuna liikuv sõiduk peegeldab seda valgust, annab püss aru peegeldunud signaali kulutatud ajast ja jagamiseks jagatakse see kahega kaugus. Kiirust mõõdetakse proovide arvu jagamisel fikseeritud mõnesekundilise kestusega. See töötab sarnaselt RADAR-süsteemiga, välja arvatud see, et see kasutab raadiolainete asemel valguslaineid.

LIDAR-relv liikluspolitseiniku käes
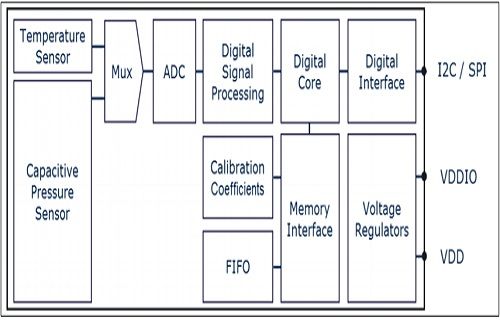
Kiirusekontrollisüsteemi töö IR-andurite abil

Blokeeritud diagramm, mis näitab kiiruse kontrollimise süsteemi tööd IR - andurite abil Edgefx komplektid
Kui sõiduk ületab IRLED-fotodioodi esimese paari vahelist teed, blokeerib see valguse tee ja fotodioodi takistus suureneb, põhjustades taimeri IC1 vastava madala signaali väljundi. Taimer IC1 tekitab väljundis kõrge signaali fikseeritud kestusega 10 ms. Normaalsetes tingimustes, normaalkiirusel, ei teki katkestust 2 vahelndFotodiood-IR LED-paar ja taimeri IC2 vastav sisend on suured, põhjustades selle väljundis madala loogikasignaali. Mõlema taimeri väljundid on ühendatud NAND-väravaga 2m, mis annab kõrge väljundi (madalate ja kõrgete sisendite jaoks), mis on ühendatud taimeri IC3 sisendiga. Taimeri IC vastav väljund on madal, mistõttu summeri on välja lülitatud. Samal ajal antakse taimeri IC1 väljund NAND gate1 mõlemale sisendile, mis annab madala loogikaväljundi, mis antakse taimerile IC4 suure loogikaväljundi saamiseks, mis on ühendatud taimeri IC5 lähtestusnõelaga. Taimeri IC5 väljund on vastavalt kõrge, andes loenduri IC-le kõrge impulsi. Loendur koosneb neljast etapist koosnevatest aastakümnete loenduritest, et lugeda mitu numbrit. Iga loenduri IC-kell on ühendatud eelmise loenduri IC kellaväljundiga. Loendur suurendab oma arvu iga pulsi tõusvas servas.
Oletame, et sõiduk liigub nii suure kiirusega, et jõuab taimeri IC1 jaoks määratud aja jooksul teise IRLED-fotodioodipaari vahele. Niisiis, nüüd näitab loendur loendust, mis jääb alla normaalarvu ja samal ajal, kuna NAND gate2 tõuseb mõlemas sisendis kõrgeks, läheb selle väljund madalaks ja vastavalt saab taimer IC3 madala sisendi, et anda kõrge loogika väljund ja vastavalt käivita helisignaal.
Seega annab kahe paari vaheline kaugus jagatuna loenduri näiduga sõiduki kiiruse ja kui see kiirus etteantud piirmäära suurendab, heliseb summer, andes selge signaali kiirusepiirangu rikkumise kohta.
Olen ühe viisi üksikasjalikult selgitanud. Kõik muud viisid on tagasiside saamiseks teretulnud.
Foto krediit:
- Liikluspolitseinik LIDAR-relvaga Wikimedia





{kind=link}