Postitus käsitleb lihtsat infrapunapõhist lähedusandurite ahelat, mida rakendatakse lindude ja nende käitumise uurimiseks, paigaldades vooluringi kunstlikult valmistatud linnupesade kõrvale. Idee soovis hr Jan Simberg.
Tehnilised kirjeldused
Loodan, et teil on aega neid paar rida lugeda. Esiteks huvitavate skeemide jaoks! Nad töötavad ka! Oleme kolm kutti, kes uurivad linde ja meil on kontrollida umbes 1700 linnupesa. Linnupesa on väike puukast, mille ees on auk.
Ma ei ole elektrik, kuid üritan leida odavat viisi, kuidas lind pesates väljaspool LED-i põlema panna (ainult mõned kümned!). LED peab vilkuma umbes 5 minutit pärast iga liikumise tuvastamist.
Ma saan kasutada aiavalgustist laetavat akut ja päikesepatareid - see on OK. Leidsin Internetist teie 'täpse infrapuna-liikumisanduri või läheduse detektori vooluringi' ja see võib olla lahendus. Kas ma saan summeri vahetada takisti abil LED-i vastu?
Teiseks leidsin teie 'tühja patarei indikaatorahel, kasutades ainult kahte transistorit' ja see oli hitt. Mis on madalaim pinge laetava aku puhul 4 korda 1,2 V = 4,8 V? Kas teil on ideid, kuidas praegust tarbimist vähendada? Mis on 5-minutiline riiv?
Pöörisvoolu- ja PIR-detektorid võivad töötada, kuid arvan, et nad tarbivad voolu liiga palju. Ultraheli detektorid ei tule kõne alla - mis sagedust lind kuuleb?
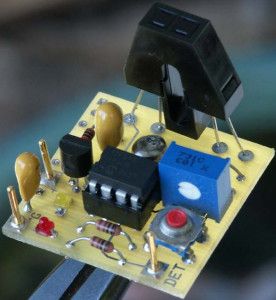
Lõpuks tegin teie IR-detektorile kiire PCB-paigutuse. Pls kustutage, kui see on liiga kohutav.
Regs,
Jan Simberg
Kujundus
Kavandatavat pesadetektorahelas olevat lindu võib mõista järgmiste punktidega:
IC LM567 on konfigureeritud standardses faasilukustatud silmusageduse detektori režiimis.
IR-fotodioodi LD274 toidetakse IC poolt määratud sagedusega ja sellest fotodioodist saab saatja.
Teine fotodiood BP104 on paigutatud ülaltoodud fotodioodiga paralleelselt nii, et see suudaks vastu võtta peegeldunud IR-kiirte takistuse (siin linnu) juuresolekul nende ees kindlaksmääratud kaugusel.
BP104-st saab vooluahela vastuvõtja IR-seade ja see on häälestatud reageerima ainult LD274-st peegelduvatele kiirtele ja mitte teistele võltsitud invasioonidele.
Niipea kui takistus on tuvastatud, käivitab ja aktiveerib BP104 IC LM567, mille väljundnõelal 8 on madal loogika.
Kuid ülaltoodud käivitatud madal loogika on aktiivne ainult seni, kuni sissetungija on tuvastustsoonis eelseadistatud.
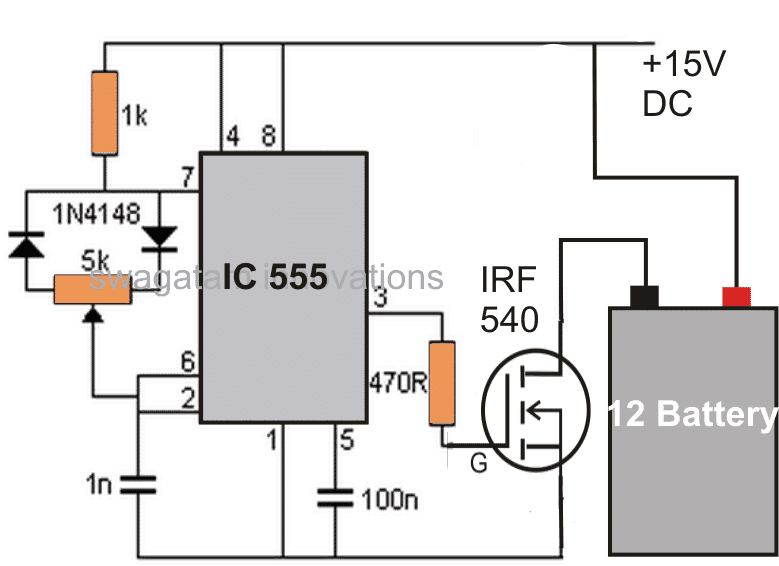
Väljundi püsimiseks mõistliku aja jooksul viiakse koos IC LM567-ga sisse monostabiilne IC 555.
IC 555 aktsepteerib madala signaali LM567 pin8-lt ja hoiab selle pin3 kõrgel teatud ettemääratud aja jooksul isegi pärast seda, kui LM567 väljund on deaktiveeritud takistuse võimaliku järsu kadumise tõttu.
Ajavahemiku, mille jooksul IC 555 pin3 jääb sisselülitatuks, saab määrata R9 / C5 väärtusi sobivalt reguleerides
Transistor T3 piirab ja takistab C5 laadimist, kuni LM567 pin8 deaktiveeritakse takistuse eemaldamise tõttu.
Ülaltoodud sammuga tagatakse, et IC 555 väljundsulguri sisselülitamise aeg algab alles pärast linnu pesasse sisenemist, see tagab ka selle, et IC 555 väljund täidab etteantud ajariivi alles pärast seda, kui IC8 LM567 pin8 on muutunud passiivseks.
Vooluringi skeem

Ülaltoodud vooluahela PCB disain, mille saatis Jan:

Paar: Ultraviolett (UV) desinfitseerimisahel kodumaterjalide desinfitseerimiseks Järgmine: Kuidas ühendada auto LED-allvalgustit