Selles postituses uurime IC L293, mis on mitmekülgne neljarattaline pool-H-draiveri IC, tehnilisi näitajaid ja kinnitusdetaile, mida saab kasutada paljude huvitavate mootorite rakendamiseks juhipõhine vooluring rakendused, näiteks mootorite, solenoidide ja muude induktiivkoormuste käitamiseks (4 ühikut eraldi või paarides läbi tõukejõu režiimi).
Kuidas see töötab
IC L293 sisaldab põhimõtteliselt kahte väljundipaari, mida saab iseseisvalt kasutada kahe eraldi koormuse käitamiseks tõukejõu režiimis või kahesuunalisel viisil, mida nimetatakse ka totemipostrežiimiks. Alternatiivina saab neid paari väljundipaari eraldi kasutada kasutatakse 4 üksiku koormuse käitamiseks ühesuunaliselt.
Ülaltoodud koormuste toiminguid juhitakse vastavate sisendtugevduste abil, mis käivitatakse välisest ostsillaatori ahelast või a PWM allikas .
Näiteks kui koormust on vaja juhtida totempoolusel, võib mikrolülituse kahe juhi astme vastavad sisendid käivitada välise ostsillaator, näiteks läbi paari NANDi värava kus üks värav võib olla ühendatud juhtmega ostsillaatorina, teine aga inverterina.
Nendelt saadud kaks faasivastast signaali NAND väravad siis saab ühendada L293 sisenditega vastavate väljundite käitamiseks totempoolusel (tõukejõud), mis omakorda töötaks ühendatud koormust samal viisil.
IC L293 kinnitusdetailide määramine
Nüüd õpime IC-i L293 kinnitusfunktsioonid, viidates järgmisele skeemile ja järgmisele selgitusele:

Pistik nr 2 on juhtimissisend, mis juhib väljundnõela nr 3.
Sarnaselt on tihvt nr 7 väljundnõela # 6 juhtimissisend.
Tihvti nr 1 kasutatakse ülaltoodud kinnituskomplektide lubamiseks või keelamiseks. Pistikul nr 1 olev positiivne hoiab ülaltoodud kinnitusdetailide komplektid lubatud ja aktiivsena, samas kui negatiivne või 0 V toiteallikas need kohe keelab.
Päris identselt muutuvad tihvtid nr 15 ja tihvtid 10 vastavate tihvtide nr 14 ja # 11 väljundite juhtimissisenditeks ning need jäävad toimima ainult seni, kuni tihvt nr 9 on positiivse loogika juures ja keelatud, kui 0V loogika sellele pinoutile rakendatud.
Nagu varem selgitatud, saab tihvte nr 3 ja tihvte nr 6 kasutada totemipoldide paaridena, sisestades nende sisendtappidele nr 7 ja tihvtidele nr 2 faasivastase loogikasignaali. See tähendab, et kui tihvti nr 2 toidetakse positiivse loogikaga, peab tihvt nr 7 olema negatiivse loogikaga ja vastupidi.
See võimaldab väljundi tihvtidel nr 6 ja tihvtidel nr 3 ühendatud koormust vastavas suunas juhtida ja vastupidi, kui sisendloogilised signaalid on vastupidised, muutub ka koormuse polaarsus vastupidiseks ja see hakkab pöörlema vastupidises suunas.
Kui seda järjestust vahetatakse kiiresti, töötab koormus vastavalt edasi-tagasi või tõukejõu viisil.
Ülalnimetatud toimingut saab korrata ka kõigi teiste draiverite küljel.
Vcc või toitepositiivsed sisendid IC jaoks konfigureeritakse iseseisvalt kahe erineva toitesisendi jaoks.
Pistikut nr 16 (Vcc1) kasutatakse lubamisnuppude käitamiseks ja muude IC sisemiste loogikaetappide käitamiseks ning selle võiks tarnida sisendiga 5 V, kuigi maksimaalne piirang on 36 V
Pistikut nr 8, (Vcc2) kasutatakse spetsiaalselt mootorite toitmiseks ja seda saab toita kõigega 4,5–36 V
IC L293 elektriline spetsifikatsioon
IC L293 on loodud töötama mis tahes toiteallikaga 4,5–36 V, maksimaalse voolutugevuse spetsifikatsiooniga kuni 1 amprit (impulssrežiimis 2 A, maksimaalselt 5 ms)
Seetõttu saab mis tahes ülaltoodud spetsifikatsioonide piires olevat koormust rakendada IC L293 käsitletud väljundites.
Sisendi juhtimise loogikat ei tohiks ületada üle 7 V, olgu siis pideva toite või PWM-i toitena.
L293 IC kasutamine mootori juhtimiseks
Nüüd õpime, kuidas rakendada mootori kontrollerite ahelaid IC L293 abil erinevate töörežiimide kaudu ja kasutades kuni 4 eraldi juhtimisvõimalusega mootorit.
Meie eelmises postituses uurisime IC-i L293 kinnitus- ja toimimisandmeid, siin õpime, kuidas sama IC-d saab kasutada mootorite juhtimiseks konkreetsete režiimide ja konfiguratsioonide kaudu.
Juhtimisrežiimid
IC L293 saab kasutada mootorite juhtimiseks järgmistes režiimides:
1) 4 mootorit sõltumatute PWM-sisendite kaudu.
2) 2 mootorit kahesuunalises või totempoolusrežiimis kiiruse juhtimisega läbi PWM
3) Üks kahefaasiline BLDC mootor, kasutades PWM-sisendit
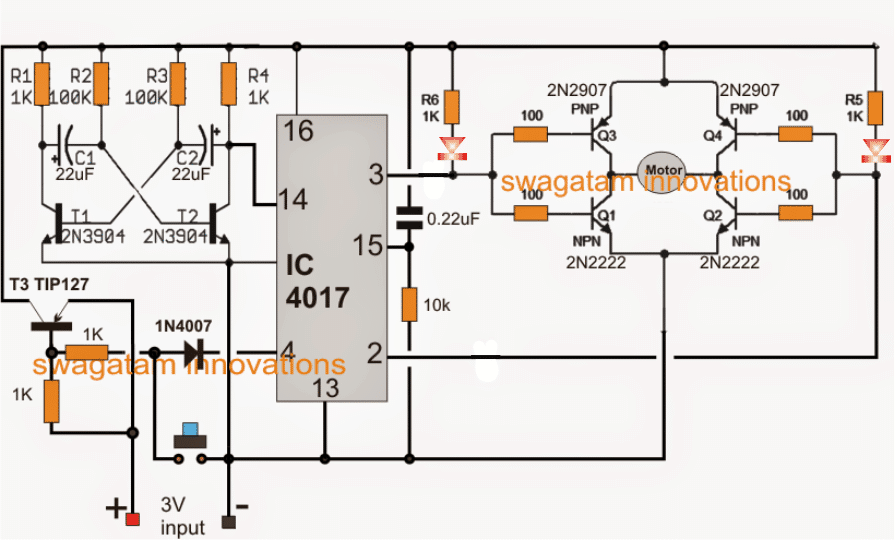
Alloleval pildil on näidatud, kuidas mikrolülitust saaks kasutada sõltumatute juhtimisseadmetega mootorite juhtimiseks, samuti seda, kuidas ühte mootorit saaks kasutada kahesuunaline kontroll :

IC vasakul küljel on mootor konfigureeritud töötama kahesuunalises režiimis. Tagamaks, et mootor pöörleb ühes valitud suunas, tuleb tihvtid nr 1 ja tihvtid nr 7 rakendada faasivastase 5 V alalisvoolu sisendiga. Mootori pöörlemissuuna muutmiseks saab seda 5V polaarsust mainitud sisendtugevdustel muuta.
Mootori ja mikrolülituse funktsioneerimise võimaldamiseks tuleb tihvti nr 1 hoida loogikal kõrgusel. Siinne loogika 0 peatab mootori koheselt.
Toiteplokk juhtimissisendil võib olla PWM-i kujul, seda saab täiendavalt kasutada mootori kiiruse reguleerimine 0-st maksimaalseks, muutes PWM-i töötsüklit.
IC paremal küljel on kujutatud paigutus, kus paari mootorit juhitakse sõltumatult PWM-sisendite kaudu vastavatel tihvtidel nr 15 ja tihvtidel nr 10.
Mootori ja IC toimimiseks peab tihvt nr 9 olema loogikalises kõrguses. Selle nööpnõela loogiline null peatab koheselt kinnitatud mootorite funktsiooni ja keelab selle.
Kuna mikrolülituse vasak ja parem külg on identsed nende kinnitusfunktsioonide üksikasjadega, võib mootorite näidatud paigutuse vahetada vastavate tihvtide vahel, et saavutada identne toimimine, nagu eespool selgitatud, mis tähendab, et kaks eraldi mootorit võiksid ühendada mikrokiibi vasakpoolne külg täpselt nii, nagu see on skeemis IC parempoolsel küljel.
Samamoodi saab kahesuunalise süsteemi integreerida mikrolaineahela paremale küljele täpselt nii, nagu on saavutatud ülaltoodud diagrammil IC vasakul küljel.
Ülaltoodud näide näitab, kuidas IC L293 saab kasutada 4 mootori eraldi juhtimiseks või 2 mootori kahesuunalises režiimis juhtimiseks ja kuidas kiirust saab reguleerida ka PWM-i voo abil IC vastavatel sisendnuppudel.
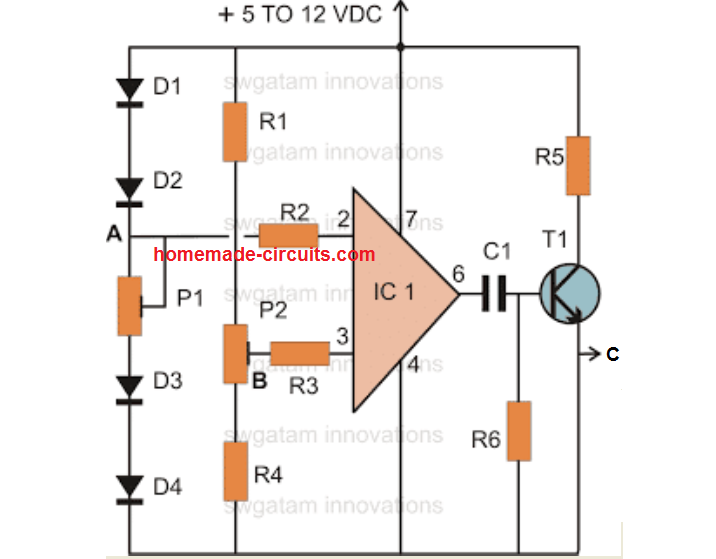
L293 kasutamine kahefaasilise BLDC mootori juhtimiseks

Ülaltoodud pildil näeme, kuidas IC L293 saab konfigureerida juhtima kahefaasilist BLDC mootorit näidatud kinnitusdetailide abil ja paari juhtimissisendi kaudu, mis on näidatud juhtimise A ja juhtimisseadmena B.
Üksikut kahefaasilist mootorit võib näha ühendatuna mikrolülituse väljunditest, sisendid on aga juhtmeta EI-väravate komplektiga, mis vastutavad mootori juhtimiseks vajaliku faasivastase sisendloogika loomise eest.
Juhtimispunktide A ja kontrollpunktide B suhtes võib kohaldada vahelduvat loogikat, võimaldades kahefaasilisel mootoril õigesti pöörelda.
Vahelduva loogika polaarsus otsustab mootori pöörlemissuuna.
Mootoril lineaarse kiiruse reguleerimise saavutamiseks võib juhtimise A ja juhtimise B sisendites rakendada PWM-i loogika vormi ja selle töötsüklit saab muuta ühendatud mootori soovitud kiiruse reguleerimise saavutamiseks.
Kui teil on tehniliste spetsifikatsioonide, andmelehe või IC-i üksikasjade osas veel kahtlusi, võite alati vastuste saamiseks julgelt allpool kommenteerida.
Eelmine: Traadita termomeeter, kasutades 433 MHz RF-linki Arduino abil Järgmine: Universaalne ESC-ahel BLDC- ja generaatormootoritele