Seda lihtsat, täiustatud 5 V nulllangusega PWM päikesepatarei laadimisahelat saab kasutada koos mis tahes päikesepaneeliga mobiiltelefonide või mobiiltelefonide akude kiireks laadimiseks, põhimõtteliselt on vooluahelal võimalik laadida mis tahes akut, olgu see siis liitiumioon või pliihape mis võib olla 5V vahemikus.
TL 494 kasutamine Buck Converteriks
Kujundus põhineb SMPS buck converter topoloogial, kasutades IC TL 494 (minust on saanud selle IC suur fänn). Tänu 'Texas Instruments' selle imelise IC pakkumise eest.
Võite selle kiibi kohta rohkem teada saada sellest postitusest, mis selgitab IC TL494 täielik andmeleht
Vooluringi skeem

Me teame, et 5V päikeselaadija vooluahelat saab hõlpsasti ehitada lineaarsete IC-de abil, näiteks LM 317 või LM 338, selle kohta leiate lisateavet järgmistest artiklitest:
Lihtne vooluga juhitav laadija vooluring
Kuid nende suurim puudus lineaarsed akulaadijad on nende keha või juhtumi hajumise kaudu eralduv soojusenergia, mis põhjustab väärtusliku jõu raiskamist. Selle probleemi tõttu ei suuda need mikrokomponendid koormuse jaoks tekitada nulllangepinge väljundit ja vajavad alati vähemalt 3 V suuremaid sisendeid kui määratud väljundid.
Siin selgitatud 5V laadija vooluring on kõigist nendest probleemidest täiesti vaba. Õppigem, kuidas kavandatud vooluahelast efektiivne töö saavutatakse.
Viidates ülaltoodud 5V PWM päikesepatareide laadimisahelale, moodustab IC TL494 kogu rakenduse südamiku.
IC on spetsiaalne PWM-protsessori IC, mida kasutatakse siin buck-muunduri astme juhtimiseks ja mis vastutab kõrge sisendpinge muundamise eest eelistatud madalama taseme väljundiks.
Vooluahela sisend võib olla vahemikus 10 kuni 40 V, mis muutub päikesepaneelide jaoks ideaalseks vahemikuks.
IC põhijooned hõlmavad järgmist:
Täpse PWM-väljundi genereerimine
Täpsete PWM-ide genereerimiseks sisaldab IC täpset 5V viidet, mis on tehtud ribalaiuse kontseptsiooni abil, mis muudab selle termiliselt immuunseks. See 5 V referents, mis saavutatakse IC tihvti nr 14 juures, muutub kõigi IC-s osalevate ja PWM-i töötlemise eest vastutavate oluliste päästikute baaspingeks.
IC koosneb paarist väljundist, mida saab kas konfigureerida vaheldumisi totemipooluse konfiguratsioonis võnkuma või mõlemat korraga nagu ühe otsaga võnkuv väljund. Esimene võimalus sobib tõukejõu tüüpi rakenduste jaoks, näiteks inverterites jne.
Kuid käesoleva rakenduse jaoks muutub ühe otsaga võnkuv väljund soodsamaks ja see saavutatakse IC maandamise tihvti nr 13 maandamisega, alternatiivina võib tõukejõu saamiseks väljundi tihvti # 13 kinnitada tihvtiga nr 14, oleme seda arutanud meie eelmine artikkel juba.
IC väljunditel on sisemiselt väga kasulik ja huvitav seadistus. Väljundid lõpetatakse IC-s asuva kahe transistori kaudu. Need transistorid on paigutatud avatud emitteri / kollektoriga vastavalt pin9 / 10 ja tihvtidele 8/11.
Positiivset väljundit vajavate rakenduste korral võib väljunditena kasutada emittereid, mis on saadaval pistikutelt9 / 10. Selliste rakenduste jaoks oleks NPN BJT või Nmosfet tavaliselt konfigureeritud positiivse sageduse aktsepteerimiseks IC-i pin9 / 10-s.
Kuna PNP-d kasutatakse koos IC-väljunditega, saab käesolevas konstruktsioonis negatiivseks vajuvaks pingeks õige valiku ja seetõttu oleme pin9 / 10 asemel ühendanud PIN8 / 11 PNP / NPN hübriidstaadiumist koosneva väljundastmega. Need väljundid tagavad piisava vajumisvoolu väljundastme toitmiseks ja suure voolu muunduri konfiguratsiooni juhtimiseks.
PWM-i juhtimine
PWM-i rakendamine, mis muutub vooluahela jaoks ülioluliseks aspektiks, saavutatakse tagasiside signaali suunamisega IC sisemisele veavõimendile selle mitteinverteeriva sisendnõela nr 1 kaudu.
Seda PWM-i sisendit saab vaadelda konksu muunduri väljundiga potentsiaalijaoturi R8 / R9 kaudu ja see tagasiside silmus sisestab nõutavad andmed IC-le, nii et IC suudab genereerida väljundites kontrollitud PWM-sid, et hoidke väljundpinget pidevalt 5 V juures.
Muu väljundpinge saab fikseerida, muutes lihtsalt R8 / R9 väärtusi vastavalt oma rakenduse vajadustele.
Praegune kontroll
IC-l on kaks veavõimendit, mis on sisemiselt seatud PWM-i juhtimiseks vastuseks välistele tagasisidesignaalidele. Ühte veavõimendit kasutatakse 5V väljundite juhtimiseks, nagu ülalpool arutatud, teist veavõimendit kasutatakse väljundvoolu juhtimiseks.
R13 moodustab voolutundliku takisti, kogu selle kaudu arenenud potentsiaal suunatakse teise veavõimendi ühte sisendtihvti nr 16, mida võrreldakse opambi teise sisendi seatud kontaktiga # 15.
Kavandatud konstruktsioonis on see seatud väärtusele 10amp kuni R1 / R2, mis tähendab, et kui väljundvool kipub suurenema üle 10ampi, võib eeldada, et tihvt16 läheb kõrgemale kui võrdlustihv määratud tasemetel.
Bucki muundur
Konstruktsioonil kujutatud võimsusaste on tavaline jõuülekande muunduri etapp, kasutades hübriidseid Darlingtoni paaritransistore NTE153 / NTE331.
See hübriidne Darlingtoni etapp reageerib PWM-i juhitavale sagedusele IC-i pin8 / 11-st ja juhib buck-muunduri astet, mis koosneb suure voolu induktorist ja kiirest lülitusdioodist NTE6013.
Ülaltoodud etapp annab täpse 5v väljundi, mis tagab minimaalse hajumise ja prefekti nulllanguse väljundi.
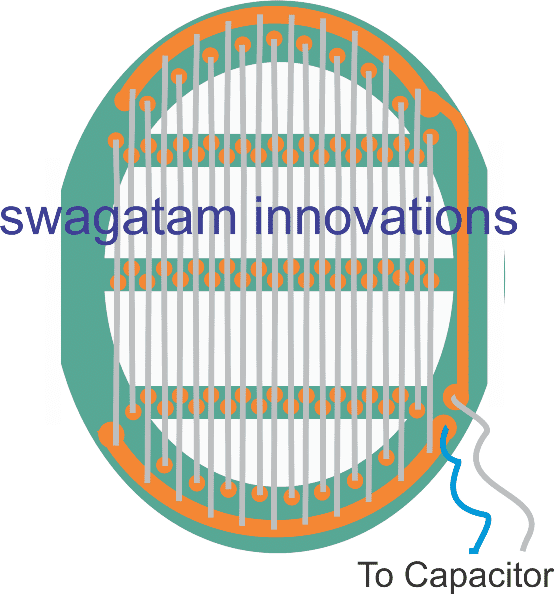
Spiraali või induktiivpooli saab kerida mis tahes ferriitsüdamiku külge, kasutades kolme paralleelset superemailitud vasktraati, mille läbimõõt on 1 mm, induktsiooniväärtus võib kavandatava konstruktsiooni korral olla 140uH lähedal.
Seega võib seda 5 V päikesepatarei laadimisahelat pidada ideaalseks ja ülitõhusaks päikeselaadija vooluringiks igat tüüpi päikesepatareide laadimiseks.
Eelmine: PWM-muundur IC TL494 vooluringi abil Järgmine: kodus HHO gaasi tõhusalt genereerida