
Termin MTech tähistab Master of Tehnoloogia ja see on inseneri erialane magistrikraad. Selle kraadi kestus on kaks aastat ja selle kraadiõppe programmi jaoks sobivad kandidaadid on BE või BTechi kraadiõppe lõpetanud üliõpilased. Selle kraadi vastuvõtmine põhineb sisseastumisel saavutatud auastmel GATE eksamid või PGECET. See magistrikraad pakub kogu Indias mitmeid spetsialiseerumisvõimalusi, nagu ECE, jõuelektroonika, manustatud, tsiviil-, arvutiteadus, keemia-, elektri-, VLSI-, mehaaniline, Tarkvaraarendus jne. Selles artiklis loetletakse Mtechi projektid ECE ja EEE üliõpilastele ning MATLABi põhised projektid Mtechi üliõpilastele.
MTechi projektid ECE ja EEE üliõpilastele
Mtechi projektid hõlmavad peamiselt riistvara, tarkvara, simulatsiooni, MATLAB jne. Siin on loetelu Mtechi projektidest ECE ja EEE õpilastele erinevates kategooriates.

MTechi projektid
M.Techi projektid Euroopa Majanduskomisjoni üliõpilastele
Nimekiri MTechi projektid ECE üliõpilastele käsitletakse allpool.

Euroopa Majanduskomisjoni projektid
RFID-d kasutavate koolilaste transpordiohutuse parandamine
See projekt rakendab süsteemi, et parandada transpordisüsteemi ohutust koolilaste jaoks, kes seda kasutavad RFID-tehnoloogia . Selle süsteemi abil saame jälgida koolilaste pealevõtmist ja maha jätmist. See süsteem sisaldab kahte suurt üksust, nagu kooliüksus ja bussiüksus.
Bussiüksust kasutatakse laste märkamiseks bussi astumisel või sealt lahkumisel. Kui lapsed bussi ei läinud ega lahkunud, saab selle teabe kohe kooli üksusele edastada.
Liikuva tehnoloogia rakendamine sõidukite parkimissüsteemi pihustamiseks
Selle projektiga viiakse parkimissüsteem ellu, et olemasolevat süsteemi oleks hõlpsam kasutada. Selles süsteemis peab kasutaja parkimiskoha broneerima SMS-i kaudu. Kui kasutaja saab parooli, peab ta sisenema parkimisalale, et pääseda juurde sõiduki parkimiseks.
ATM-terminali kujundamine sõrmejälgede tuvastamise abil
Üldiselt traditsiooniline Pangaautomaat terminalipõhine kliendi tuvastamise süsteem sõltub peamiselt pangakaartidest, paroolidest. Nii et selliseid meetodeid ei mõõdeta ideaalselt ja funktsioonid on äärmiselt üksikud.
Traditsiooniliste süsteemide vigade lahendamiseks rakendatakse uus ATM-terminali kasutav kliendi tuvastamise süsteem, kasutades turvalisuse tagamiseks sõrmejälge.
Sõrmejälgede tuvastamise põhine arvutisisene sisselogimissüsteem
Me teame, et biomeetriline tehnoloogia kasutab kasutajate äratundmiseks füüsilise muidu käitumise erinevaid omadusi. See projekt rakendab arvutisse sisselogimiseks sõrmejälgede tuvastamisel põhinevat süsteemi.
ARTS - täiustatud maapiirkondade transpordisüsteemid
ARTS pakub teavet transpordisüsteemide ja kaugeteede kohta. Selle süsteemi parimad näited hõlmavad peamiselt ilmastikutingimuste, automatiseeritud tee- ja suunateabe edastamist. Sellised andmed on maapiirkondadesse reisijatele väärtuslikud. Seda süsteemi rakendati USA-s ja see on kasulikum maapiirkondadele sellistes riikides nagu India.
Õnnetuste tuvastamise süsteem kiirendusmõõturi abil
Selle projektiga rakendatakse kiirendusmõõturi abil sõiduki õnnetuse tuvastamise süsteem. Me teame, et sõidukite turvalisus või reisimine on kõigi jaoks peamine mure. Kui õnnetus juhtub, värskendab õnnetuste avastamise süsteem politsei juhtimisruumi.
Andurit nagu kiirendusmõõturit kasutatakse avarii tõttu sõidukis toimuva gravitatsioonijõu ootamatu muutuse tuvastamiseks ja seejärel lülitab mikrokontroller GSM-modemi SMS-i saatmiseks muretsetud mobiilinumbrile. Süsteemi töökindlust ja stabiilsust saab toote disaini abil testida erinevates tingimustes.
FIR-filtri uurimine viivituste vähendamise ja energiatõhususe parandamiseks
FIR-disaini saab teha liitjate, korrutiste ja koefitsientide abil. Algoritmi nagu MCM (mitmekordne pidev korrutamine) kasutatakse projekti kujundamisel FIR-filter vooluringi keerukuse vähendamiseks suurendage viivitust ja korrutamist tohutu ala abil. Need probleemid on optimeeritud uue meetodi abil, näiteks numbriline jada MCM, näiteks viivitus, kasutamine ja keerukus.
Osaliselt ümberkonfigureeritav FIR-filtri disain, kasutades FPGA-d
See projekt kavandab osaliselt ümberkonfigureeritava FIR-filtri koos süstoolse DA (Distributed Arithmetic) disainiga, mis on optimeeritud väljaga programmeeritavad väravate massiivid (FPGA). Täielikult torujuhtmega arhitektuuri kasutatakse väikese võimsusega, efektiivse arvutusliku kiire FIR (Finite Impulse Response) filtri rakendamiseks. Piiratud ümberkonfigureerimise aja vähendamiseks rakendatakse LUT-i (otsingu tabel) hajutatud aritmeetikas uut kujundust.
Filtrite omaduste mõistmiseks on see filter dünaamiliselt ümber konfigureeritud LPF ja HPF muutes osalise ümberseadistamise mooduli FIR koefitsiente. Selle disaini saab teostada FPGA komplekti abil nagu XUP Virtex 5 LX110T. Filtri disain näitab disaini aja ja efektiivsuse arengut.
Tervise jälgimissüsteem hädaolukorras, kasutades asjade internetti
Selle projektiga luuakse IoT kaudu süsteem patsiendi keha jälgimiseks ajavahemikus 24X7. Selle süsteemi abil saab patsiendi füsioloogilisi parameetreid jälgida iga 15 sekundi järel. Kavandatud süsteem on vastutav andmete kogumise eest südame löögisagedusest, pulsist ja keha temperatuurist ning edastab kogutud andmed WIFI-mooduli kaudu IoT Cloudi platvormile.
Lõpuks saab patsiendi tervisliku seisundi säilitada pilves. See süsteem võimaldab murega inimesel nagu meditsiiniarstil patsiendi tervist ja seisundit pilveserveris pidevalt kontrollida. See projekt pakub patsientidele tõhusaid ja sobivaid tervishoiuasutusi.
Autonoomne põllumajandusrobot, mis kasutab WSN-i ja Interneti-ühendust
Arenev tehnoloogia meeldib IoT (asjade Internet) näitab eelseisvat võrgu- ja arvutitööd. IoT-põhise WSN-i parimaks rakenduseks on põllumajanduse seire kaugemast piirkonnast. IoT-põhine WSN seisab atmosfääri drastiliste muutuste tõttu silmitsi paljude probleemidega. See kavandatud süsteem rakendab mobiilse roboti võrku, kasutades põlluharimisrakenduste jaoks IoT-d.
Robotid, nagu isand ja ori, kasutavad usaldusväärsete anduriandmete jagamiseks NRF-protokolli kaudu ühendatud WSN-i. Selles projektis kasutatakse pilditöötlust ja andureid, kus umbrohu tuvastamiseks kasutatakse pilditöötlust ja valguse, niiskuse, niiskuse jms tuvastamiseks kasutatakse andureid.
M.Techi projektid elektri- ja elektroonikaseadmete õppuritele
Nimekiri Mtechi projektid EEE õpilastele käsitletakse allpool. Elektriprojektide mõisted hõlmavad peamiselt jõuelektroonikat, taastuvenergiat ja m tehnoprojektid elektrisüsteemides .

EEE projektid
Päikesepatareide ja akude salvestamise integreerimine kolmetasandilise NPC-muunduri abil
Seda projekti kasutatakse võrguga ühendatud süsteemi nagu NPC inverter rakendamiseks, integreerides päikeseenergiasüsteemi aku kaudu. Selles projektis esitatakse juhtimisalgoritm päikese, võrgu ja aku PV vahelise jõuülekande juhtimiseks, mis annab koheselt MPPT (maksimaalse võimsuspunkti jälgimine) päikese PV töö.
Selle süsteemi tõhusust saab uurida paljude olukordade simuleerimise kaudu, näiteks aku laadimine ja tühjendamine erinevatel päikese kiiritustasemetel.
Kolmefaasilise PWM vahelduvvoolu PF korrigeerimine Hakkija põhine HBCC-meetodiga induktsioonmootori ajamisüsteem
Selles projektis pakutakse välja selline süsteem nagu kolmefaasilise PWM vahelduvvoolu hakkuri abil toidetava induktsioonmootori ajam. Seda projekti kasutatakse asünkroonmootori ajamisüsteemi sisendi PFC saavutamiseks erinevatel töötingimustel.
Selle võimsusteguri korrigeerimise saab saavutada, sundides pidevalt tegelikku kolmefaasilist voolu pakkuma samaväärsete võrdlusvoolude kaudu, mis toodetakse faasil koos pingeallikatega HBCC (hüstereesiriba voolu juhtimine) meetodil.
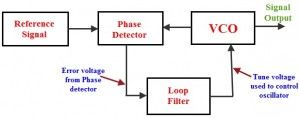
Võrgu abil ühendatud PV-süsteemide maksimaalse võimsuse jälgimise ja inverteri hüstereesivoolu intelligentne juhtimine
See projekt rakendab maksimaalse võimsuspunkti jälgimissüsteemi, kasutades võrguga ühendatud PV-süsteemi närvivõrke. See süsteem on ehitatud PV-massiivi, kolmefaasilise muunduri, võimendusmuunduri ja võrguga.
Selle süsteemi närvivõrk suudab arvata massiivi kõrgeima võimsuse saavutamiseks vajalikku klemmipinget. Selles süsteemis saab mõõta töötsüklit ning juhtida võimenduse muunduri lüliteid. Kolmefaasilisele muundurile antakse hüstereesivoolumeetod, nii et muunduri väljundpinge püsib stabiilsena vajalikus seadepunktis. Ootamatute ilmastikutingimuste korral saab kogu süsteemi simuleerida tarkvara MATLAB või SIMULINK kaudu.
Väline induktori disain pingega juhitava DSTATCOM-i jõudluse parandamiseks
Termin DSTATCOM tähistab jaotuse staatilist kompensaatorit. Seda kasutatakse peamiselt koormuspinge reguleerimiseks ja selle jõudlus sõltub peamiselt sööturi impedantsist. Kuid pinge reguleerimise uuring DSTATCOM-i jõudluse analüüsimiseks sõltub peamiselt võrgu parameetritest. See süsteem pakub pinge juhtimisrežiimis töötava DSTATCOMi täielikku projektiuuringut, kasutamist ja paindlikku juhtimist.
DSTATCOM-i täieliku pinge reguleerimise võimsuse analüüs on selles süsteemis esitatud mitmesuguste etteande impedantside all. Pärast seda esitatakse standardne disainiprotsess välise induktori väärtuse arvutamiseks. Rakendatakse ka dünaamilise etalonkoormuspinge genereerimissüsteem. See süsteem võimaldab DSTATCOM-il anda tavapärase töö korral tagasi koormuse reaktiivvõimsust ja toetab ka pinget häirete ajal.
Parameetri optimeerimine püsimagnetiga harjadeta mootoris hägusa loogika juhtimiseks
See projekt rakendab meetodit erinevate parameetrite optimeerimiseks püsimagnetiga harjadeta mootori väga hägusas loogilises juhtimises. See süsteem kasutab närvivõrgu optimeerimist kõigi fuzzy loogika juhtimisstrateegias fikseeritud parameetrite sõlmimiseks.
Vektorjuhtimisanalüüsi süsteemi ja hägusat kontrollerit demonstreeritakse MATLAB-i simulatsiooni abil nende jõudlusega võrdväärseks. Selle projekti peamine eesmärk on hägustatud loogikahaldussüsteemi jõudluse parandamine.
Dünaamiline pinge taastaja reaalajas simulatsioon, kasutades RTDS ja dSPACE
Kavandatud süsteem kasutab DVR-i (dünaamiline pinge taastaja) tundlike koormuste kaitsmiseks elektrivõrgu häirete tasakaalustamiseks.
Dünaamiline pinge taastaja sisaldab erinevaid jõuelektroonika muundureid, näiteks vahelduvvoolu alalisvoolu, alalisvoolu vahelduvvoolu muundureid, juhtimissüsteemi ja seeriamuundurit. Seda juhtimissüsteemi simuleeriti RTSP-dega (reaalajas digitaalsimulaator), kasutades HTSP-d (riistvaraline silmus) dSPACE-s.
Reaalajas digitaalsimulaatorites kujundati toiteahelad ja töötati välja dPSACE juhtimisloogika. Dünaamiliste pinge taastajate dünaamilise jõudluse uurimiseks viiakse läbi simulatsioonitestid.
MPPT võrguga ühendatud tuuleelektrijaamas, kasutades lülitatud reluktantsgeneraatorit ja intelligentset kontrollerit
Selles projektis rakendatakse kõrgeima võimsuse saamiseks arukaid kontrollereid nagu MPPT-süsteemi SRG (lülitatud reluktantsigeneraator) jaoks, mida juhitakse läbi tuuliku. Nutikad kontrollersüsteemid on ANN-kontroller (kunstlik närvivõrk) ja FL-kontroller (hägune loogika). Need kontrollerid reguleerivad tuuliku pöörlemiskiirust, muutes väljalülitatud nurka lülitatud reluktantsigeneraatoris.
Tuulejaama saab võrku ühendada, kasutades kahte maksimaalset võimsustrafot ja alalisvoolu-vahelduvvoolu inverterisüsteemi. Nende süsteemide simulatsiooni saab teha MATLAB-i abil.
Tahkis ja pehmelt lülitatav trafo
See projekt rakendab uut topoloogiat täiesti kahesuunalise tahkis-ja pehme-lülitiga trafo jaoks. Minimaalse topoloogia tunnused on 12 peamist seadet ja kõrgsagedusega trafot. See ei kasuta vahelduvvoolu pingelinki, kuid annab nii sinusoidse i / p kui ka o / p pinge.
Need trafod on konfigureeritud peamiselt kahe või mitme terminaliga alalisvoolu, ühe- või mitmefaasiliste vahelduvvoolusüsteemidega liidestamiseks. Vooluahela taolist abresonantsi kasutatakse nullpinge lülitusseisundite loomiseks suuremate seadmete jaoks ja see aitab interaktsioonide juhtimisel vooluringi parasiitosade kaudu. Moduleeritud struktuur võimaldab muundurelementide järjestikku või paralleelset virnastamist kõrgepinge ja suure võimsusega rakenduste jaoks.
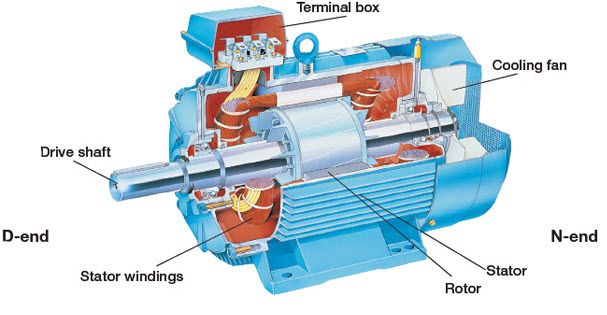
Avatud ahelaga samm-mootori modelleerimine ja juhtimine
Selle projektiga rakendatakse samm-mootori modelleerimise ja juhtimise süsteemi. Nii tööstusautomaatika kui ka mikroprotsessorirakenduste saabudes laiendatakse tähelepanu ka digitaalsetes liikumispõhistes juhtimissüsteemides. Hübriidseid samm-mootoreid kasutatakse laialdaselt avatud kontuuriga rakendustes.
See kavandatud süsteem rakendab hübriid-samm-mootori kontuuri. Selle mootori ajamisstrateegiad on esitatud nagu tagasiliikumine ja täielik samm. Kirjeldatakse süsteemimeetodite iseloomustust ning mudeli kontrollimiseks hinnatakse katsetulemuste ja simuleeritud tulemuste tulemusi. See projekt näitab, et avatud kontuuriga samm-mootor on õige simulatsioon tõelise riistvara jõudluse arvutamiseks.
10 parimat IEEE-põhist Mtechi projekti
Siin on loetelu IEEE standarditel põhinevatest kümnest parimast Mtechi projektist elektroonikas. Erinevalt B.Techi projektidest, mis ei pea olema reaalajas või teaduspõhised, on elektroonikal ja kommunikatsioonil põhinevad Mtechi projektid täiesti reaalajas ja neid rakendatakse enamasti igas organisatsioonis või tööstusharus. Järgnev on kõigi projektide loetelu koos lühikese ideega nende kohta.
MOSFETi sisseehitatud andur MEM-rakenduste jaoks
See on üks viimaseid Mtechi projekte MEM-ide valmistamine . See projekt hõlmab MOSFET-põhise anduri väljatöötamist, mis põhineb asjaolul, et seadme äravool lähtekohta muutub stressi rakendamisel. CMOS-elektroonika integreerimine MEM-anduritega hõlbustab odava, täpse ja kõrge tundlikkusega signaali konditsioneerimise voolu väljatöötamist.

MOSFETi sisseehitatud andur
Traadita kehapiirkonna võrgu kujundamine
Selle projekti eesmärk on välja töötada traadita seiresüsteem, kus erinevate patsientide keha parameetrid lähteandmetena multipleksitakse ja edastatakse seirejaama, kus neid analüüsitakse ja töödeldakse tarkvara, näiteks MATLAB abil. Projekt hõlmab ka biomeditsiiniliste andurite kasutamist ja RF-moodul traadita suhtlemiseks.

Kehapiirkonnavõrk
Sõrmejäljesüsteemi kujundamine mahtuvuslike MEM-de puutetundliku anduri abil
Selle projekti eesmärk on kujundada sõrmejäljeandur, konstrueerides, simuleerides ja valmistades andurite mahtuvuslikku massiivi, kasutades MEM-ide tootmistehnikad . See süsteem hõlmab andurite abil ränikihil olevate harjade ja orgude tuvastamist.
Mobiilne anduriga navigeerimissüsteem
See on üks sisseehitatud projektid kasutatakse sellistes rakendustes nagu robootika, seire, eluslooduse seire, kus on vaja jälgida liikuvaid sihtmärke. Mobiilse anduri navigeerimissüsteem kasutab pool lõplikku programmeerimistehnikat, mis hõlmab sihtmärgi asukoha hindamist TOA mõõtemudeli põhjal. See mudel võtab arvesse müra olemasolu anduri andmetes.
Sõiduki kokkupõrke vältimise süsteem
Selles projektis tehakse ettepanek kasutada dünaamilist funktsioneerimist hõlmavat närvivõrgu arhitektuuri, mis põhineb udustel komplektidel, kokkupõrkevastase ennustussüsteemi väljatöötamiseks. Selle süsteemi eesmärk on põhimõtteliselt vähendada kokkupõrkest tingitud liiklusõnnetuste arvu.

Kokkupõrke vältimise süsteem
RF kiirguspakett
See projekt on välja töötatud RF-kiirgussüsteemi väljatöötamiseks, millel on väga ranged pakendiprobleemid ja kõrge impulsi kordumissagedus. See on loodud väljatugevuse saavutamiseks kuni 4700KV / m.
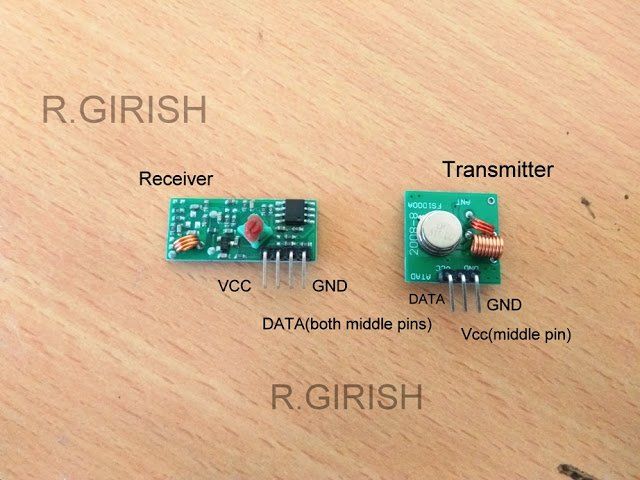
Raadiosageduskiirguse pakett sisaldab patareisid, toiteallikat, Marxi generaatorit ja Marxi üksuse väljundina otse ühendatud antenne. Seda süsteemi saab kasutada ka teistes elektroonika ja kommunikatsiooniprojektid .
Energiasäästlik autonoomse sõidukiga juhtimissüsteem
Selle projekti eesmärk on välja töötada energiasäästlik juhtimissüsteem, mis põhineb liiklussignaalide teabest. See hõlmab a traadita side sõidukite ja liikluskorraldusseadme vahel.
Süsteem hõlmab ka andurite kasutamist ümbritseva keskkonna tuvastamiseks ja kohaliku liiklusteabe saamiseks. Anduri sisendite põhjal pakutakse välja metaheuristlik lähenemine optimeeritud juhtimissüsteemi väljatöötamiseks.
360 kraadi robotipööret
Selle projekti eesmärk on välja töötada täielik automaatne robot, mis suudab mitte ainult tajuda oma teel olevaid objekte, vaid suudab objektid üles võtta ja paigutada teistesse kohtadesse või muuta suuna suunda nagu vali ja aseta robot . Selle süsteemi eesmärk on saavutada roboti 360-kraadine pöörlemine, kus robot saab iseseisvalt pöörata igas suunas. See on ka üks populaarsemaid manustatud projektide tüüpe.
Android-põhine traadita termotrükisüsteem
See projekt on mõeldud Bluetooth-tehnoloogiat kasutava traadita termotrükisüsteemi arendamiseks. See hõlmab traadita ülekanne andmeedastus Android-põhisest rakendusest kontrollerile, kasutades Bluetooth-tehnikat, ja seejärel printida andmed termoprinteri abil.

Traadita termotrükisüsteem
Iirise äratundmisel põhinev biomeetriline süsteem
Selle projekti eesmärk on kavandada biomeetriline süsteem, mis hõlmab inimese tuvastamist iirise struktuuri põhjal. See biomeetriline süsteem kasutab iirise piltide saamiseks kõrge eraldusvõimega pildistamistehnikat IR-valgustusmeetodiga ning seejärel töötleb pilte digitaalse tehnoloogia abil, et saada üksikisiku üksikasju. See on stabiilsem ja annab parema jõudluse.

IRIS-i tuvastamise süsteem
Iirise liikumispõhine ratastooli juhtimine Raspberry Pi abil - algus kunstist
Puudega olemine muudab inimesed oma igapäevase töö tegemiseks teistest sõltuvaks. Selliste inimeste abistamiseks, et nad saaksid ülesannet iseseisvalt teha, pakutakse välja palju meetodeid ja projekte. Halvatus on meditsiiniline seisund, mis jätab ka puudega inimesed. Üheks selliseks halvatuseks on Quadriplegia. Selles halvab kogu keha, välja arvatud silmad.
Selle projekti eesmärk on aidata selliseid inimesi, kes kannatavad Quadriplegia all. Siin kontrollivad nende ratastooli liikumist nende silmaliigutused. Selle idee elluviimiseks kasutatakse IR-kaamera moodulit ja piltide töötlemine toimub OpenCV abil. Püütoniga programmeeritud Raspberry Pi kasutatakse süsteemi juhtimiseks.
Nutikas saagianalüüs Raspberry Pi abil, mis põhineb asjade internetil
Põllumajandus on paljudes riikides peamine sissetulekuallikas. Kasvava kasvuhooneefekti ja reostuse tõttu muutub meie ilmatsükkel juhuslikult ja kliimatingimusi on raske ennustada. See ilmastikutingimuste muutus mõjutab suuresti põllukultuuri kasvu. Selles projektis kasutatakse masinõppe algoritmi, et prognoosida kasvatatavat põllukultuuri sõltuvalt kogutud topoloogilistest andmetest, pinnasest ja ilmastikutingimustest.
Selle süsteemi (SHARP) eesmärk on aidata põllumajandustootjatel saada kõrge saagikus, et see süsteem (SHARP) saaks jälgida põllukultuuri veetaseme juhtimiseks, automaatseks niisutamiseks ja käsitsi / automaatseks juhtimiseks. mootorid . Vaarikat Pi kasutatakse andmete kogumiseks, serveri kaudu saatmiseks ja andmebaasi värskendamiseks. Neid andmeid kasutatakse ennustamiseks ja neid saab vaadata mobiiltelefonist.
Vaarika Piirkonna Roverberry Rover, kasutades mitut andurit
Looduslike või inimtegevusest tingitud õnnetuste ajal on päästekomandode jaoks kõige keerulisem töö inimeste leidmine prahi hulgast. Sellises olukorras on ka mõned ohtlikud ja piiratud ruumid, kuhu päästemeeskond ei pääse. see projekt on kavandatud sellistes ohtlikes olukordades abiks olema. Raspberry Pi abil loodud neljarattalisel Roveril on kompaktne kere koos mitme anduriga, näiteks Temperatuuriandur , Niiskusandur, gaasidetektor ja öönägemise kaamera.
Reaalajas robotauto juhtimine, kasutades ajulaineid ja pea liigutusi
Selles projektis juhitakse robotautot pea liikumise ja silmade pilgutamise abil. Emotiv Epoc peakomplekti kasutatakse güroskoopide ja EEG signaalide saamiseks. Neid signaale kasutatakse robotauto suuna määramiseks.
Läviväärtused otsustatakse gürosignaali maksimaalse ja minimaalse amplituudväärtuse ning beeta- ja alfa-lainete suhte alusel. Arduino UNO-d kasutatakse selle projekti elluviimiseks tänu madalale kulule ja programmeerimise paindlikkusele. Seega toimub selles projektis robotauto reaalajas juhtimine pea liigutuste abil.
Mikrokontrolleril nutitelefonil põhineva päikesepaneeli seiresüsteem
Fossiilkütuste ammendumisega liigume looduslike energiaallikate kaudu energia kogumise poole. Mõned looduslikud energiaressursid on tuuleenergia, päikeseenergia, loodete energia jne. ... Päikeseenergia kogumine võib olla parim lahendus meie energiavajaduste rahuldamiseks tulevikus. Paljud riigid on juba paigaldanud päikeseelektrijaamad päikeseenergia saagiks.
Sellega muutub ülioluliseks fotogalvaaniliste elementide jälgimine ja nende tekitatud võimsuse mõõtmine. Selles projektis pakutakse välja reaalajas seiresüsteem, mis saaks nutitelefoni abil jälgida päikesepaneelide toimivust. Süsteemi juurutamiseks kasutatakse Arduino Atmega 2560 koos pingeanduri, vooluanduri ja temperatuurianduriga. Wifi moodulit kasutatakse süsteemi ühendamiseks nutitelefoniga. Rakendust Blynk kasutatakse päikesepaneelide pinge, voolu ja temperatuuri mõõtmiste kuvamiseks.
VLSI projektid Mtechi üliõpilastele
Palun lugege seda linki Elektroonikatehnika üliõpilaste VLSI projektide uusim nimekiri
Usume, et ülalnimetatud jõuliste ja arenenud Mtech-projektide väljatöötamiseks tehtud pingutused oleksid tohutult abiks neile õpilastele ja lugejatele, kes on väga huvitatud projektide tegemisest paljudes valdkondades, nagu robootika, MEM-id, Android OS , Sisseehitatud süsteemid ja nii edasi.
Seega on see kõik ECE ja EEE õpilaste Mtechi projektide loetelu. Lisaks oleme regulaarselt pakkunud artikleid kõigile oma lugejatele ja jälgijatele, eriti neile, kes otsivad Mtechi ja inseneriprojekte. Seetõttu soovitame oma lugejatel ja jälgijatel mainida oma projektinõudeid ja projektidega seotud valikuid koos oma tagasisidega allpool toodud kommentaaride jaotises.
Foto autorid:







{kind=link}