Praegu droonid on muutunud väga populaarseks paljudes valdkondades, nagu kaardistamine, võidusõit, logistika, küsitlused ja palju muud. See on mehitamata õhusõiduk või mehitamata õhusõidukite süsteem, mis on lendav robot, mis suudab autonoomselt lennata või eemalt juhtida. Seega on need droonid manustatud tarkvaraga juhitava lennuga, mis töötab koos a-ga globaalne positsioneerimissüsteem ja andurid. Turul on erinevat tüüpi droonid erineva suurusega ja mida kasutatakse erinevatel eesmärkidel, näiteks mitme roaliseerimisega, üherooga, fikseeritud juhtmestik ja fikseeritud tiibadega hübriidvtol. Kuid mitme rootoriga droonid mängivad nende laialdase kasutamise tõttu võtmerolli. See artikkel täpsustatakse a multirotoorne droon , nende töö ja rakendused.
Mis on rootori droon?
Mitmeturiline droon on mehitamata õhusõiduk või multiparektor, mis kasutab erinevaid fikseeritud pikkusega pöördeteradega rootoreid, et saada tõste- ja tõukejõudu, võimaldades vertikaalset õhkutõusmist, hõljumist ja maandumisvõimalusi. Niisiis, rootori nurk saab fikseerida ja mitte muuta, sarnaselt kopteriga. Muudes suhtelist kiirust erinevate rootorite vahel, saab tõukemomendi jõudu muuta, et juhtida lennuki trajektoori.
Mitmeturiline on üsna lihtne ja püsiv ning mitme rootoriga lennuki välimus on lennukiga võrreldes palju väiksem. Seega on see sobiv vaba aja veetmiseks ja tööstuseks. Seega on mitme rootoriga droonioperatsioon lihtne ja võib vertikaalselt startida, välja arvatud raja. Seega sõltub selle usaldusväärsus peamiselt harjadeta mootoritest, seega on sellel suurem usaldusväärsus.
Samal ajal on paljudes põllumajanduslikes ja tööstuslikes valdkondades laialdaselt kasutatud mitme rootoriga UAV-sid, millel on lihtne töö ja tugev stabiilsus. Niisiis, neid droonisid iseloomustavad kaks ülaltoodud rootorit, sealhulgas standardkonfiguratsioonid, nagu tricopter (kolm), quadcopter (neli), heksakopter (kuus) või kaheksajalgset (kaheksa) rootorit.
Multirotoorne droon töötab
Mitme rootoriga droonid töötavad, kasutades tõste- ja juhtimislendude tootmiseks mitut rootorit, tavaliselt 4, 6 või 8, muutes üksikute rootorite kiirust, võimaldades manöövreid, nagu tõusvad, hõljuvad, pööravad, pööravad ja laskuvad.
Iga rootor pöörleb õhu alla surumiseks, tehes drooni tõstva ülespoole suunatud reaktsioonijõu. Rootori kiirust ühtlaselt reguleerides saab droon teisiti tõusta. Kui rootori kombineeritud tõukejõud tasakaalustab drooni raskust, võib see hõljuda.
Kui tagumised rootorid pöörduksid esi rootoriga võrreldes kiiremini, siis droonid eelnevad ja vastupidi. Seega, muutes ühe külje rootoriks teisega võrreldes kiiremini, veereb droon selles suunas. Tehes diagonaalselt vastasküljed teistest kiiremini, pöörab see droon selles suunas.
Nii genereerivad pöörlevad rootorid pöördemomendi, mis on mitme roogariliste droonidena võrreldes sellega, et mõned rootorid pöörduvad päripäeva ja teised pöörduvad vastupäeva, mis tühistab kogu pöördemomendi. Droonid kasutavad andureid, arvutipõhiseid positsioneerimissüsteeme ja güroskoope püsivuse säilitamiseks ja õhus oma tee leidmiseks, võimaldades täpseid manöövreid.
Multirotoorsed droonitüübid
Mitme rootoriga droonid on saadaval erinevat tüüpi ja neid kasutatakse erinevates rakendustes, kus jõudlus variatsioonid, lennuaeg, kandevõime ja stabiilsus.
Trirotoor
Trimotoori droon on valmistatud kolme rootoriga, et tekitada ujuvust, mida kasutatakse liikumiseks ja juhtimiseks. Seega on käe kaugus üldiselt 120 kraadi ja on tavaliselt y-kujus korraga T-vormis mõnikord. Seda tüüpi drooni eelised on madalad kulud, paindlikkus ja selle valguse suurus, kuna see nõuab ainult kolme rootorit, mis on üsna odav konfiguratsioon. Samaaegselt võib sellel mootorinumbrite tõttu olla ka madal tõstevõimsus.

Kvadrotoor
See on kõige populaarsem ja levinum mitmekordse koopiate tüüp, mis on saadaval X- ja H-vormides. Niisiis, neli mootorit asetatakse sümmeetrilisele raamile ja iga käsi on X4 konfiguratsioonis üldiselt 90 kraadi. Kaks mootorit pöörduvad päripäeva, ülejäänud kaks pöörlevad aga vastupäeva, et saada vastasjõud tasakaalustatud. Seega saavutab see stabiilsuse, lennuaja ja hinna jaoks ideaalse jõudluse.

Heksakopter
Heksakopter asetatakse sümmeetrilisele raamile ja iga käsi on üldiselt 60 kraadi. Hexadecopter sisaldab stabiilsuse ja jõu suurendamiseks rohkem mootoreid kui kvadrotoor. See droon võib parandada ka suurt koondamisvõimaluse vahendamist, nii et isegi kui drooni mootor ebaõnnestub kogu lennu vältel, võib see Air & Landil turvaliselt õigesti töötada. Aga mootorid on rohkem energiatarbimist, seega väheneb lennuaeg. Seega võib see sarnaneda ka nelikopteriga, kus kolm mootorit pöörduvad päripäeva ja ülejäänud kolm pööret CCW, et saada tasakaalu hoidmiseks tagurpidi jõud.

Kaheksajalg
Octokopteri droon sisaldab tavaliselt kaheksat rootorid tugeva stabiilsuse ja jõuga. See võtab tugevama tuulega suuremat kasulikku koormust vastupanu . See droon näeb välja sarnane uuendatud kvadrotooriumi ja Hexadecopteriga. Neid kasutatakse sageli professionaalsel või filmil ja neid saab paigutada raskemate läätsede ja kaameratega. Selle energiatarbimine on kiire ja drooniraami suurus on suurte mootorite arvu suurenemise tõttu.

Koaksiaalne multi-rotoorne droon
See on eriline mitme rootoriga droon, mida nimetatakse koaksiaalseks x8 drooniks, mis kasutab kaheksat mootorit neljale harule. Seda saab täiendada suurema jõu ja vähem ruumi abil. See hõlmab sarnase pöördeteljega kontsentrilistel telgedel asuvaid rootoreid, kuid pöörleb tagurpidi suundades. Meie toode MX860 võtab vastu koaksiaal X8 drooniraami, mis kajastab väikest ja suurte kandevõime funktsioone.

Multirotoorsed droonikomponendid
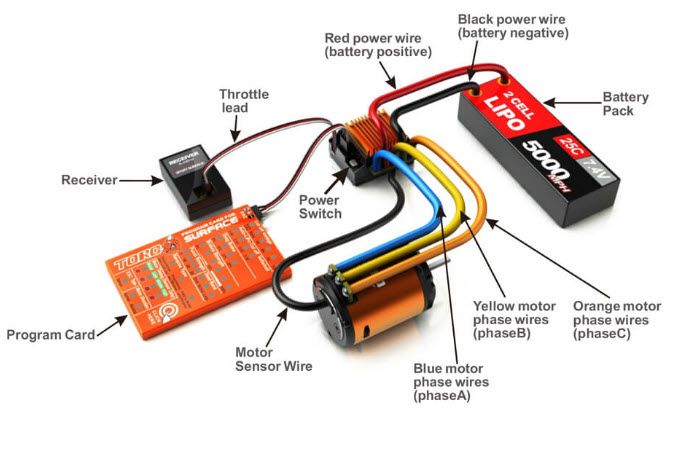
Mitmeturiline droon on valmistatud erinevatega komponendid, mis hõlmavad mootoreid, raame, propellereid, elektroonilisi kiiruse kontrollereid, lennukontrollereid, aku ja kaugjuhtimissüsteemi, mida käsitletakse allpool.

Raami
Drooni raam toimib nagu selgroog, mis tagab kinnituspunktid peamiselt kõigi teiste komponentide jaoks. See on valmistatud eriti ülitugevate ja kergete materjalidega, näiteks alumiiniumsulamist või süsinikkiust. Selle disain mõjutab drooni kogukaalu, stabiilsust ja suurust.
Mootorid
Selle drooni mootorid aitavad propellereid pöörata, pakkudes jõudu ning genereerides tõste- ja tõukejõudu. Need droonid kasutavad tavaliselt BLDC (harjadeta alalisvoolu) mootorid töökindluse ja tõhususe tagamiseks. Mootorite tüüp ja arv sõltuvad peamiselt drooni konfiguratsioonist, nagu heksakopter või kvadkopter.
Propellerid
Propellerid on drooni mootoritega ühendatud, et saada tõste- ja tõukejõud, lastes droonil lennata. Nii et propellerite kuju ja suurus mõjutavad peamiselt drooni kiirust, tõstmist ja manööverdamist. Propelleri materjalid on süsinikkiud, plast või muud komposiidid, sõltuvalt drooni kavandatud kasutamisest.
Lennukontroller
Lennukontroller töötab nagu multi-rotoorse drooni aju, mis töötleb andurite teavet mootori juhtimiseks. Niisiis, ta vastutab multi-rotoorse drooni stabiliseerimise eest lennul, et säilitada kõrgust, et käskude täitmiseks kaugjuhtimispuldist täita. Need kontrollerid sisaldavad tavaliselt erinevat tüüpi andureid nagu kiirendusmõõturid, GPS -moodulid, güroskoobid jne.
Elektrooniliste kiiruse kontrollerid
Elektroonilise kiiruse kontrollerid muudavad mootorite suunda ja kiirust, tagades drooni liikumise täpse kontrolli. Iga mootor sisaldab tavaliselt oma elektroonilist kiiruse juhtimist või muidu saab mitme kanaliga ESC juhtida mitut mootorit korraga.
Aku
Drooni aku varustab võimsust kõigile komponentidele, nagu mootorid, andurid, lennukontroller jne. Niisiis otsustab aku maht drooni lennuaeg ja erinevat tüüpi akud pakuvad erinevaid ACT -i omadusi.
Kaugjuhtimissüsteem
Kaugjuhtimissüsteem võimaldab operaatoril droonile juhiseid saata, juhtides oma lennuteed, kiirust ja kõrgust. Kaugkontroll sisaldab tavaliselt saatjat ja vastuvõtjat, mis suhtleb drooniga juhtmevabalt.
Mõned muud komponendid
Mõned muud multi-rotoorse drooni komponendid hõlmavad maandumisvarustust, gimbalit, kaamerat või andureid, propellereid, GPS-i antenn jne
- Maandumisvarustus pakub stabiilset tuge droonide õhkutõusmiseks ja maandumiseks.
- Gimbal on mehaaniline stabiliseerimissüsteem, mis sisaldab kaamerat või erinevaid andureid, mis võimaldab neil vaatamata drooni liikumisele tasemel püsida.
- Videote, andmete või piltide jäädvustamiseks kasutatakse kaameraid või andureid.
- Selle drooni GPS -antenni kasutatakse täpseks positsioneerimiseks ja navigeerimiseks.
Fikseeritud tiib vs multirotoorne droon
Allpool käsitletakse erinevust fikseeritud tiibadega vs multirotoorsete droonide vahel.
| Fikseeritud tiib droon | Multirotoorne droon |
| Fikseeritud tiivaga droonid näevad välja nagu lennukid ja kasutavad tiibu tõstmiseks ja tõukejõuks, võimaldades tõhusaid ja pikamaalende. | Multirotoorsed droonid näevad välja nagu helikopterid ja kasutavad mitut rootorit peamiselt vertikaalsete tõste- ja hõljumisvõimaluste jaoks, mis muudab need sobivaks lähedaste ja täpsete ülesannete jaoks. |
| Fikseeritud tiibadega droonide vahemik on umbes 80 miili. | Mitme rootoriga droonide ulatus on vahemikus 10–15 kilomeetrit |
| Neid droone kasutatakse suure piirkonna katmiseks, pikamaaülesanneteks ja kiiruseks. | Multirotoorseid droone kasutatakse üksikasjalike kontrollide, manööverdamise ja vertikaalse startimise/maandumise või hõljumise vajalike ülesannete täitmiseks. |
| Selle lendamiseks on vaja koolitust. | Seda on lihtne juhtida ja manööverdada. |
| Ei suuda fikseeritud asendit hoida. | See droon saab hõljuda. |
| See droon võib lennata horisontaalselt. | See võib lennata nii horisontaalselt kui ka vertikaalselt. |
| Selle suurus on vähem kompaktne. | See droon on kompaktsem. |
| See on kallis. | See on sageli madalad kulud. |
| See droon vajab rohkem ruumi ja seda on keeruline maanduda. | See droon võib maanduda määratud kohta. |
| Sellel on pikem lendav aeg. | Selle lendav aeg on piiratud. |
| See droon kannab raskemaid kasulikke koormusi. | See võib kanda väikseid koormusi. |
| Selle tuule stabiilsus on suurem. | Selle tuule stabiilsus on väiksem. |
Multirotoorne droonipuudulikkus
Multirotoorset droonipuudulikkust võivad põhjustada erinevad allikad nagu propelleri kahjustus, mootori rikke- ja juhtimissüsteemi probleemid.
- Propelleri rikke võib sageli esineda kareda maandumise või kokkupõrgete tõttu; Seega võib see põhjustada tera kahjustusi, stabiilsuse mõju ja kontrolli.
- Mootori riket saab märgata mõne meetodiga, näiteks piesoelektrilised andurid, aidates selliste jaotuste mõju ära tunda ja vähendada.
- Juhtimissüsteemi rike võib põhjustada tasakaalustamata lendu, tuues esile tugevate tõrketaluvate süsteemide nõude.
Muud tegurid
Muud multirotoorsete droonide tegurid hõlmavad peamiselt järgmist.
- Keskkonnatingimused nagu vihm, ilmastikuolud ja tugev tuul võivad ka droonide tõrkeid peamisi põhjuseid.
- Operaatori vead nagu sobimatu käitlemine ja suunajaotamine võivad põhjustada ka katastroofi.
Drooni tõrked on käsitletud
- Reaalajas rikke tuvastamise süsteemide täitmine, näiteks need, mis kasutavad IMU andme- ja masinõppe algoritme, on enneaegse hoiatuse jaoks ülioluline.
- Juhtimissüsteemide arendamine võib hüvitada mootori purunemiste või muude erinevate tõrgete eest, mis võimaldab turvalist maandumist muidu erakorralisele manöövritele.
- Üleliigsete komponentide, näiteks lennujuhtide või mitme mootori kasutamine võib parandada ohutust ja töökindlust.
- Rikete vältimiseks on vajalik droonikomponentide regulaarne hooldus ja kontrollimine.
Eelised ja puudused
Selle Mitmeturiliste droonide eelised Lisage järgmine.
- Mitme rootoriga droonid paistavad silma kitsastes ruumides, täpse liikumise ja juhtimisega, isegi tuulevaiksetes tingimustes.
- Selle disain ja abistatud lennutehnoloogia lühendab operatsiooni.
- Need võivad vertikaalselt startida ja maanduda, kõrvaldades spetsiaalsete käivitusseadmete ja radade nõude.
- Need droonid saavad oma kohale hõljuda, mitmes suunas lennata ja keerulisi õhu manöövreid teha.
- Need droonid on fikseeritud tiivaga droonidega võrreldes taskukohasemad.
- Paljud multirotoorsed droonid on kaasaskantavad ja kompaktsed.
- Neil võivad olla spetsiaalsed andurid ja seadmed.
- Need on rakendatavad erinevates valdkondades.
- Selle drooni mitmed rootorid tagavad koondamise, võimaldades droonil lennata, isegi kui minimaalne mootor ebaõnnestub.
Selle Mitmeturiliste droonide puudused Lisage järgmine.
- Mitme rootoriga droonidel on piiratud kiirus ja vastupidavus, mis muudab nad pikaajalise jälgimise, suuremahulise õhu kaardistamiseks, pikamaakontrollide jms jaoks sobimatuks.
- Need on väga ebaefektiivsed ja vajavad gravitatsiooni vastu võitlemiseks ja nende õhus hoidmiseks palju energiat.
- Need on praeguse akutehnoloogiaga piiratud umbes 20–30 minutiga, kandes kerget kaamerat.
- Multirotoorse droonide kiiruse ja ulatuse ja piiratud lennuaeg on võrreldes muud tüüpi droonidega.
- Need on tundlikud tuule suhtes, mis mõjutab nende sobivust pikamaa- või suuremahulistel missioonidel.
Multirotoorsed droonirakendused
Selle Mitmeturiliste droonide rakendused Lisage järgmine.
- Mitme rootoriga droonid jäädvustavad kvaliteetseid pilte ja videoid eksklusiivsest õhust vaatenurgast.
- Nad jälgivad ja jälgivad liikumist ja alasid, et pakkuda ohutuse eesmärgil reaalajas visuaalseid andmeid.
- Need on varustatud erinevatega andurid See kajastab mudelite üksikasjalikku georuumilist teavet, luues kaarte ja korraldades erinevatel valdkondadel topograafilisi uuringuid.
- Nad pääsevad juurde raskesti ligipääsetavatele piirkondadele, võimaldades kulude ja riskide vähendamiseks elektriliinide, sildade ja infrastruktuuride kontrollimist.
- Neid saab kasutada selliste ülesannete jaoks nagu pestitsiidide ja väetise pihustamine, põllumajandusväljakute maa -uuringute ja põllukultuuride jälgimine,
- Need droonid on väärtuslikud katastroofipiirkondade hindamiseks või puuduvate inimeste leidmiseks.
- Teadlased kasutavad seda mitmesugustel teaduslikel eesmärkidel, nagu geoloogilised uuringud, bioloogilised uuringud ja atmosfääriuuringud.
Seega on see ülevaade Mitmeturilised droonid, nende töö ja nende rakendused. Nii et multi-rotoorsete droonide näited on järgmised: kolmekoopiad kasutavad kolme rootorit; Neljakopterid kasutavad nelja rootorit, heksapaarid kasutavad kuus rootorit ja kaheksajalgsed kopterid kasutavad kaheksat rootorit. Nende hulgas on kvadkopteri droonid väga populaarne drooni tüüp. Seega on siin teile küsimus: mis on droon?