Selles postituses käsitleme neljarattalise kere kokkupaneku põhitõdesid alumiiniumtorude ja -poltide abil. Artikli hilisemates jaotistes käsitleme ka lihtsa droonilülituse kohta, mida võiks kasutada väikese droonikomplekti lennutamiseks, sõltumata keerukatest mikrokontrolleritest.
Quadcopter on võib-olla kõige lihtsam lendav masin, mis nõuab minimaalset aerodünaamilist täpsust ja komplikatsioone, ja seetõttu pole üllatav, et see võib saada tohutu populaarsuse erinevate harrastajate seas, kes suudaksid seda edukalt ehitada .... masin, millega nad tegelikult lennata saaksid ja kontrolli omal soovil.
Quadcopteri dünaamika
Asjaolu, et kvadrokrooniga droon on tehniliselt ja dünaamiliselt kõige lihtsam, tuleneb tegelikult 4 sõukruvi osalemisest ja tasakaalustatud raami struktuurist, mis võimaldavad masinal suhteliselt rasketes kliimatingimustes lennata suhteliselt hea tasakaaluga.
Kuid lihtsus tähendab ka seda, et süsteem ei pruugi olla nii efektiivne kui tavalised lennuki- ja helikopterimudelid, mis on keerukalt välja töötatud ülikiire kiiruse ja kütusekulu ning loomulikult kandevõime näitamiseks ... kõik need võiksid olla sisuliselt puudub tavalises kvadrokopterisüsteemis.
Sellegipoolest, mis puutub hobiprojekti, saab sellest masinast ideaalne valik enamusele entusiastidele, kellele on väga lõbus ja intrigeeriv ehitada kodus omaette lennumasin, mis lõppkokkuvõttes „kuulab” ja lendab mis tahes suunas. kasutaja eelistab seda liikuda.
Uue mängija jaoks, kes ei pruugi olla tehniliselt nii informeeritud, võib isegi selle lihtsa masina mõistmine olla äärmiselt keeruline, lihtsalt seetõttu, et enamikul paljude veebisaitide kaudu esitatud seotud infost ei suudeta seda mõistet hõlpsalt ja „keeles” arutada. võib võhikule sobida.
See artikkel on spetsiaalselt kirjutatud neile mitte eriti tehnilistele inimestele, kes on huvitatud uhke lendamasina ehitamisest, kuid peavad seda teemat liiga raskesti seeditavaks.
Miks on kvadrokoptereid täna nii lihtne ehitada?
Kas olete kunagi mõelnud, miks on kvadrokoptereid ja droone tänapäevases maailmas nii lihtne ehitada ja oli elektrienergia abil varem võimatu?
Põhjuseks on liitium-ioonakude arendamine ja täiustamine. Need on tänapäeval saadaval olevad eriti tõhusad akud, mis pakuvad muljetavaldavat võimsuse ja kaalu suhet. Koos sellega on BLDC mootorite ja ülimalt rafineeritud püsimagnetmootorite leiutamine aidanud kaasa ka droonide hõlpsasti konstrueeritavaks muutmisele.
Liitium-ioonaku suudab mootoritel pakkuda suurepärast pöörlemismomenti, mis on piisav, et lükata kvadrokopter üksus sekundite jooksul suurele kõrgusele maapinnast, ning võimaldab sellel ka pikka aega õhus püsida esitus väga tõhus ja kasulik.
Kuidas Quadcopter lendab
Hüppame nüüd õigesti ja mõistame, millised on quadcopteri edukaks lennutamiseks vajalikud asjad. Siin on põhitõed masina sujuvaks lendamiseks:


1) Põhimõtteliselt vajab masin tugevat ja tugevat keha, kuid eriti kerge. Selle võib valmistada või kokku panna õõnsa ruudukujulise alumiiniumist väljapressimistoru abil, puurides sobivalt auke ja kinnitades raami mutrite ja poltidega.
2) Struktuur peaks olema täiusliku „+” või täiusliku „x” kujul, see ei muuda nii kaua, kui ristuvate torude vaheline nurk on igaüks 90 kraadi.

Quadcopteri ehitamiseks vajalikud põhielemendid on nähtavad järgmisel pildil:

Osa kokkupaneku simulatsioon
Allpool toodud ligikaudne animeeritud simulatsioon näitab, kuidas ülaltoodud elemente kokku panna:

Kuidas konstrueerida Quadcopter Framework
„+” Raami alumiiniumi saab valmis alumiiniumist väljapressimistorude asjakohase lõikamise ja suuruse järgi, nagu allpool näidatud:

Raami suurus on suhteline ja seetõttu pole see ülioluline. Võite ehitada laia raami koos üksteise külge paigaldatud mootoritega või ehitada üsna kompaktse raami struktuuri, kus mootorid pole üksteisest liiga laiad ... kuigi tuleb tagada, et propellerid on parema tasakaalu ja tasakaalu võimaldamiseks üksteisest hästi eemal.
3) Raamikonstruktsioon „+” peab olema varustatud ruudukujulise platvormiga keskmises osas, kus raami harud kohtuvad ja ristuvad üksteisega. See võib olla lihtsalt hästi poleeritud alumiiniumplaat, mis on sobiva mõõtmega, et mahutada mugavalt kogu vajalik elektroonika ja juhtmestik.
Seega on see keskne plaat või platvorm põhimõtteliselt vajalik süsteemi elektroonika paigaldamiseks ja majutamiseks, mis vastutaks lõpuks teie kvadrokopteri juhtimise eest.
4) Kui ülaltoodud raamistik on valmis, peavad mootorid olema ristkangide otstes kinnitatud, nagu on näidatud ülaltoodud joonistel.
5) On ütlematagi selge, et kõik paigaldustööd tuleb teha ülitäpselt ja täiusliku joondusega, see võib vajada selle töö jaoks kogenud valmistaja kaasamist.
Kuna kõik disainilahendustes on paaridena, ei ole elementide täpne joondamine tegelikult liiga keeruline, see on lihtsalt paaride võimalikult suure sarnasuse määramine ja sobitamine, mis omakorda tagab tasakaalu, tasakaalu ja sünkroonimise maksimaalse taseme süsteemi jaoks.
Kui raamistik on üles ehitatud, on aeg integreerida elektroonilised ahelad vastavate mootoritega. Seda tuleb teha vastavalt antud vooluringi juhendis toodud juhistele.
Trükkplaate võiks paigaldada keskplaadi alumisele küljele sobiva korpusega või plaadi kohale, jällegi sobiva kapiga, et see tihedalt sulgeda.

Propellerite pöörlemissuuna mõistmine
Tasakaalustatud tõstmise mootori sõukruvide pöörlemissuuna analüüsimine:
Viidates ülaltoodud animeeritud simulatsioonile, tuleks mootori tiivikute pöörlemissuund joondada järgmiselt:
See peab lihtsalt olema selline, et ühe varda otstes olevad mootorid peaksid olema identsed, kuid erinevad teise varda mootori suunast, see tähendab, et kui ühel vardal pöörlevad mootorid päripäeva, siis teise otsa mootorid täiendavad varras tuleb häälestada vastupäeva pöörlema. suund.
Palun vaadake ülaltoodud simulatsiooni, et õigesti mõista mootorite vastukäivat liikumist, mida võib vaja minna mootoritele, et tagada tasakaalustatud liikumine
Kuidas kontrollida kvadrokopteri suunda, reguleerides mootorite kiirust.
Jah, kvadrokopteri lennusuunda saab muuta ja juhtida vastavalt teie enda soovile ja tahtele, rakendades asjaomastele mootoritele lihtsalt erinevat kiirust (RPM).
Järgmised pildid näitavad, kuidas põhikiiruse ülekannet saab asjakohastele mootoritele rakendada, et saavutada ja täita masinale soovitud lennusuund:




Nagu ülaltoodud diagrammidel on näidatud, vähendades mootorite komplekti kiirust asjakohaselt või suurendades vastupidise mootorite komplekti kiirust või kohandades kiirusi vastavalt enda eelistustele, võib kvadrokopterit panna õhus liikuma mis tahes soovitud konkreetne suund.
Ülaltoodud pildid tähistavad põhisuundi, nagu edasi, tagasi, paremale, vasakule jne ... kuid ka muud kummalist suunda saab tõhusalt rakendada, reguleerides asjakohaste mootorite pöörlemissagedusi või võib see olla ainult üks mootor.
Näiteks selleks, et sundida masinat lendama N / W suuna suunas, võib suurendada ainult S / E mootori kiirust ja võimaldada masinal lennata N / E suunas, P / S kiirust W mootorit võib suurendada ... ja nii edasi. Seda tuleb lihtsalt harjutada, kuni quadcopteri täielik juhtimine muutub kasutaja poolt saavutatavaks ja valdavaks.
Praktilise quadcopteri kujundamine
Siiani õppisime drooni kere ja riistvara põhikonstruktsiooni kohta, nüüd õpime, kuidas väga tavaliste komponentide abil kiiresti ja odavalt teha kvadrokopterit või drooniringe. Ühes minu varasemas postituses õppisime, kuidas teha suhteliselt keerukat ja seetõttu tõhusat kvadrokopteriga lendavat masinat ilma mikrokontrollerit kasutamata. Lisateabe saamiseks võiksite läbida järgmised postitused:
Pult ilma MCU-ga | Elektrooniline vooluring
Käesolevas artiklis püüame ülaltoodud disaini palju lihtsamaks muuta, eemaldades harjadeta mootorid ja asendades need harjatud mootoritega ning võimaldades sellest tulenevalt kompleksist lahti saada BLDC draiveri voolu moodul .
Kuna quadcopteri mehaanilisi konstruktsioonilisi üksikasju on eespool juba põhjalikult käsitletud, käsitleme ainult vooluahela kujunduse osa ja õpime, kuidas seda saab kavandatud lihtsaima drooniringiga lennata.
Nagu varem mainitud, nõuab see lihtne quadcopter ainult põhilisi raadiosageduslike kaugjuhtimispultide mooduleid, nagu on näidatud allpool näites:

Teil on vaja osta need RF moodulid mis tahes veebipoest või kohalikult elektrooniliselt kasutatavalt varuosadelt:
Peale ülalnimetatud RF puldimoodulid Vaja on ka 4 püsimagnetiga harjatud mootorit, mis tegelikult moodustavad droonimasina südamiku. See võib olla määratletud järgmisel pildil koos antud kirjeldustega või mis tahes muu sarnane vastavalt nõutavatele kasutaja spetsifikatsioonidele:

Mootori elektrilised spetsifikatsioonid:
- 6V = tööpinge (tipp 12 V)
- 200mA = töövool
- 10 000 = p / min
Osade nimekiri
- 1K, 10K 1/4 vatti = 1 tk
- 1uF / 25V kondensaator = 1no
- Eelseadistatud 10K või 5K = 1no
- Rx = 5-vatine traattakisti, väärtus kinnitatakse katsega.
- IC 555 = 1 nr
- 1N4148 Dioodid = 2nos
- IRF9540 Mosfet = 1no
- 6V mootoriga harjatud tüüp = 4nos
- Painduvad juhtmed, joodis, voog jne
- Üldotstarbeline PCB ülaltoodud osade kokkupanekuks
- 4-kanaliline RF kaugjuhtimispult, nagu on näidatud asjakohastel piltidel.
- Alumiiniumist kanalid, kruvid, mutrid, plaadid jne, nagu artiklis on selgitatud.
- Aku nagu allpool näidatud:

Kuidas seadistada kaugjuhtimispuldi vastuvõtjat mootoritega
Enne kui saate aru, kuidas kaugjuhtimispuldi vastuvõtjat kvadrokopterite mootoritega konfigureerida, oleks oluline teada saada, kuidas mootori kiirusi peaks reguleerima või joondama, et tekitada vajalikke vasakule, paremale, edasi, tagasi liikumisi.
Peamiselt saab kvadrokopterit liikumiseks lubada kahel viisil, mis on režiimides „+” ja „x”. Meie disainis kasutame drooni põhilist liikumisrežiimi +, nagu on näidatud järgmises skeemis:

Viidates ülaltoodud skeemile, mõistame, et peame droonil soovitud suundmanöövrite sooritamiseks lihtsalt asjakohaste mootorite kiirusi suurendama.
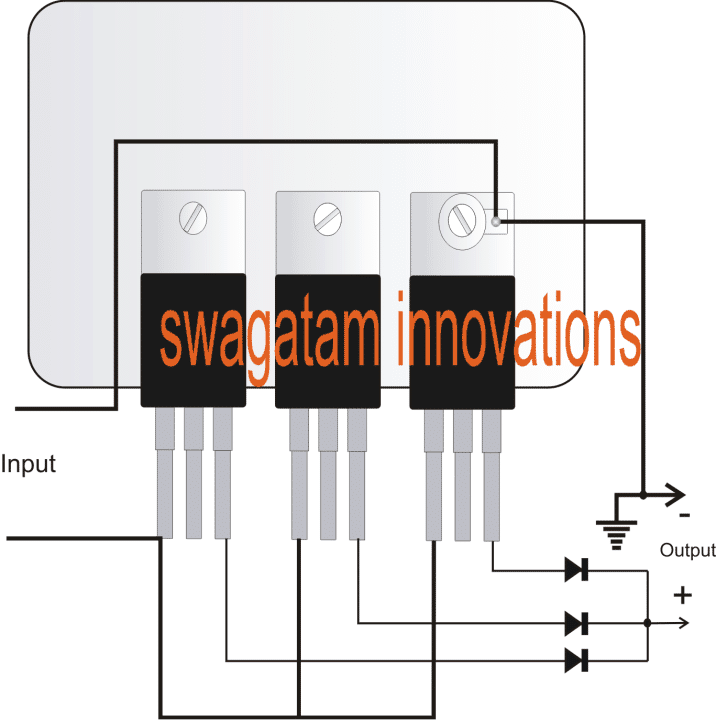
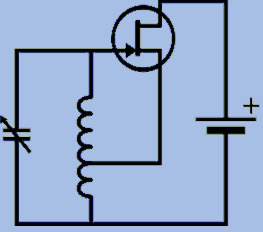
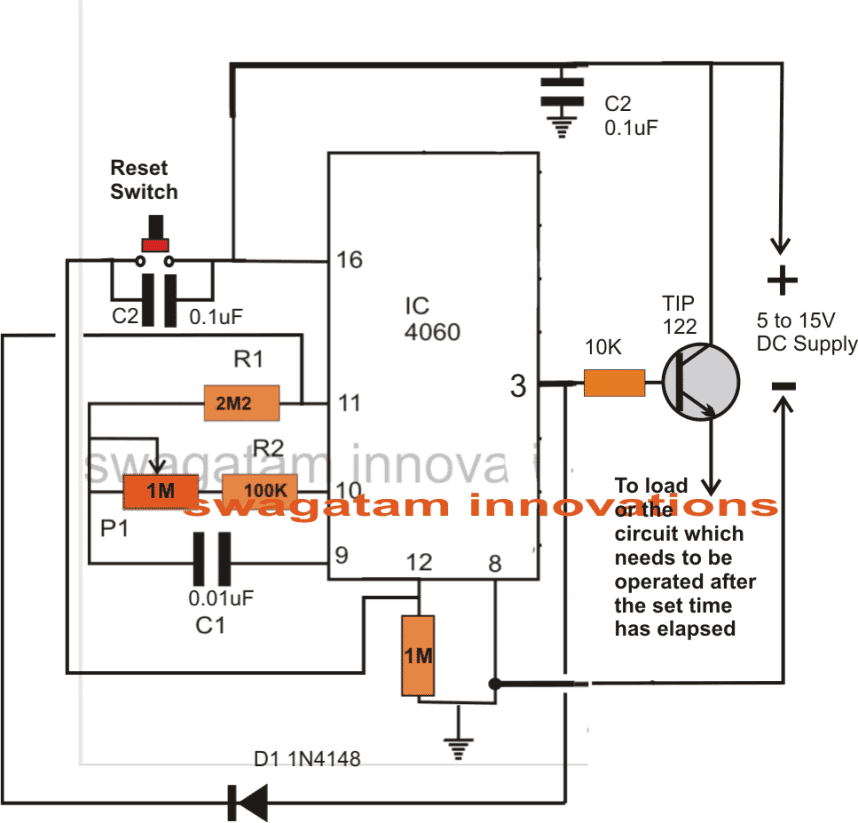
Seda kiiruse kasvu saab saavutada kaugjuhtimispuldi releede konfigureerimisega vastavalt järgmisele ühendusskeemile. Alloleval diagrammil näeme IC 555 PWM ahel juhtmega 6 relee kaugjuhtimispuldi vastuvõtja mooduli 4 releega (1 relee on kasutamata ja selle saab ruumi ja kaalu suurendamiseks lihtsalt eemaldada).
PWM-i reguleerimine
Nagu diagrammil võib näha, on PWM etteanne ühendatud kõigi releede N / C kontaktidega, mis tähendab, et tavaliselt hõljuks kvadrokopter selle ühtse ja võrdse PWM etteandega, mille töötsüklit võib esialgu reguleerida nii, et kvadrokopter suudab saavutada õige tõukejõu ja kõrguse.
Seda võib katsetada, kohandades näidatud PWM potti sobivalt.
Releekontaktide konfigureerimine
Releede N / O kontakte saab näha otse positiivse toiteallikaga, nii et kui kaugsaatja telefonitorul vajutatakse vastavat nuppu, aktiveeritakse vastuvõtja moodulis vastav relee, mis omakorda võimaldab vastaval mootoril saada kogu 12 V toiteallikas akust.
Ülaltoodud toiming võimaldab aktiveeritud mootoril saada rohkem kiirust kui ülejäänud mootorid, mis võimaldab kvadrokopteril liikuda ettenähtud suunas.
Niipea kui kaugjuhtimisnupp vabastatakse, peatub droon koheselt ja jätkab hõljumist püsirežiimis.
Samamoodi saab muid suunaliigutusi lihtsalt saavutada, kui vajutate kaugjuhtimispuldil teisi määratud nuppe.
Ülemine relee on masina ohutu maandumise tagamiseks, selleks lisatakse joonise relee N / O kontaktiga järjestikku voolutakistustakisti.
Selle takisti väärtus tuleb mõne katse abil arvutada nii, et kvadrokopter hõljuks maapinnast paari jala kõrgusel, kui see takisti lülitatakse läbi ühendatud relee.
Vooluringi skeem

Näidatud releed on raadiosagedusmooduli vastuvõtja osa, mille kontaktid pole algselt ühendatud (vaikimisi tühjad) ja need tuleb juhtmega ühendada, nagu on näidatud ülaltoodud skeemil.
RF kaugvastuvõtja peaks olema paigaldatud kvadrokopteri sisse ja selle releed on juhtmetega ühendatud vastavate mootorite ja akuga vastavalt ülaltoodud paigutusele.
Näete mõnda pistikut (rohelist värvi), mis võivad asjatult droonile raskust lisada. Kaalu vähendamiseks võite need kõik eemaldada ja ühendada asjakohased juhtmed jootmise teel otse trükkplaadiga.
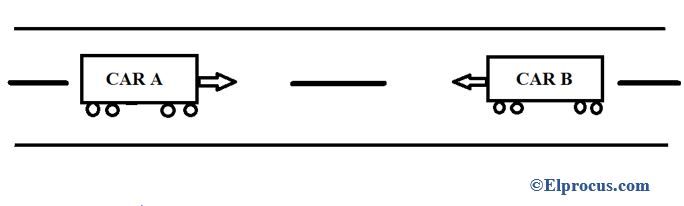
Kuidas droon liigub:
Nagu ülaltoodud arutelus on selgitatud, käivitab see konkreetse kaugnupu vajutamisel quadcopteri mooduli vastava relee, põhjustades vastava mootori kiiremat liikumist.
See toiming sunnib masinat omakorda liikuma vahetatava mootori vastassuunas pöörlemiseks kiirema pöörete arvuga.
Nii näiteks põhjustab lõunamootori kiiruse suurendamine masina liikumise põhja suunas, põhjamootori suurendamine lõunasse liikumise, samamoodi idamootori kiiruse suurenemine lääne ja vastupidi.
Huvitav on see, et lõuna / ida mootorite suurendamine võimaldab kvadrokopteril liikuda vastupidise põhja / lääne suunas, mis on diagonaalrežiimis .... ja nii edasi.
Plussid ja miinused ülalkirjeldatud lihtsa Qaudcopteri kaugjuhtimisahelaga.
Plussid
- Odav ja lihtne ehitada isegi suhteliselt uue harrastaja poolt.
- Ei vaja keerukaid juhtkangi toiminguid.
- Saab juhtida ühe 6-kanalilise kaugjuhtimismooduli abil
Miinused
- Harjatud mootorite osaluse tõttu vähem efektiivne aku varundamine
- Suundkiirus on püsiv ja seda ei saa kaugjuhtimispuldi kaudu muuta
- Manööverdamine ei pruugi nuppude vahetamise ajal sujuv olla, pigem pisut tõmblev.
Eelmine: Jõutundlik takisti on selgitatud Järgmine: mahtuvuslik pinge jagaja