LED draiver või bipolaarne LED-draiver on elektriskeem, mis reguleerib LED-i või LED-lambi voolu ja pinge reguleeritud kogust. LED-lamp on valgus, mis sisaldab valgusdioodide paigutust, mis on konfigureeritud tõhusaks tööks mõeldud elektriskeemis. Bipolaarsed LED-draiverite ahelad on LED-ide jaoks optimeeritud toiteallikad ja neid tuntakse üldiselt kui 'LED-draivereid'.
LED-draiverid saavad toite peamisest vahelduvvoolu (AC) allikast (esmane pinge). Juht parandab selle esmase pinge, et tekitada LED-lambi juhtimiseks sekundaarsel küljel püsiv alalispinge. LED-draiveritel võivad olla mahukad rauast südamikuga trafod, mis vähendavad peamist kõrgepinget LED-lambi madalamale pingele (näiteks 12 V).
Enamik leibkondi kasutab a muundur LED-lambi pinge vähendamiseks nende madalama hinna ja väikese vormiteguri tõttu.
Bipolaarse LED põhistruktuur
Valgusdioodid (LED) on kaheterminalised pooljuhtseadmed. LED-id PN-ristmik vabastab footoneid, kui termoluminestsentsiks nimetatud protsessis voolab sellest läbi vool. LED-i värvi määrab kasutatud materjali tüüp - see määrab pooljuhile omased energiaribavahe omadused.

LED-i ja vooluahela sümboli struktuur
LED on valmistatud ka P-N ristmikust, kuid räni ei sobi, kuna energiatõke on liiga madal. Esimesed LED-id valmistati galliumarseniidist (GaAs) ja tekitasid infrapunavalgust umbes 905 nm juures.
Selle värvi tekitamise põhjus on juhtimisriba ja GaAs madalaima energiataseme (valentsriba) energia erinevus. Kui üle LED-i rakendatakse pinget, antakse elektronidele piisavalt energiat, et hüpata juhtimisriba ja vool voolab. Kui elektron kaotab energia ja langeb tagasi valentsribasse, eraldub sageli footon (valgus).

Footonvalguse kiirgus pooljuhis
Bipolaarne LED-draiveri mikrokontrollerit kasutades
See on allpool toodud lihtne vooluring ja disain hõlmab mikrokontrolleri, ostsillaatori liidestamist ja mikrokontrolleri ahelate lähtestamist ja LED-takisti valimist.

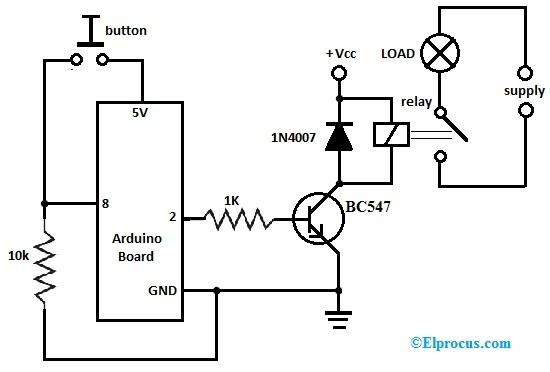
Bipolaarne LED-draiveri ahel mikrokontrolleri abil
Siin kasutatava LED-i pinge langus on 2,2 V ja seetõttu saab seda 5 V toiteallika abil kallutada. Bipolaarse LED-i juhtimiseks kasutab skeem mikrokontrollerit. LED-draiveri vooluahelat kontrollib Mikrokontrolleri programm , põhineb sisendnuppudel. Mikrokontroller on vastavalt programmeeritud saatma asjakohaseid signaale kahele väljundnõelale. Need väljundnõelad on ühendatud bipolaarse LED-i klemmidega.
Mikrokontrolleri liidestamine toimub kahe nupuvajutuslüliti ühendamisega porti P1 ja kahevärvilise LED-i kahe klemmi ühendamisega porti P2. Ostsillaatori disain stabiilsuse tagamiseks valitakse kaks 10pF keraamilist kondensaatorit. Kellasignaal genereeritakse 11MHz kristalli ostsillaatori abil.
Lähtestusahel on konstrueeritud valides elektrolüüdikondensaator 10uF ja takisti 10K, et saavutada nullimisimpulsi laius 100 ms. Takisti pingelangust hoitakse umbes 1,2 V.
Bipolaarse LED-draiveri ahela töö
Kui vooluahel on sisse lülitatud, skaneerib mikrokontroller alati sisendi tihvte pordis P1. Esimese nupu vajutamisel võtab mikrokontroller vastavas sisendpoldis vastu madala loogikasignaali ja vastavalt sellele määrab kompilaator tihvtile P0.0 kõrge loogikasignaali ja pinale P0.1 madala loogikasignaali. See paneb LED-i punase tule põlema.
Nüüd, kui teist nuppu vajutatakse, määrab kompilaator vastavalt madala loogikasignaali, mis määratakse nii väljundi tihvtidele kui ka LED kustutatakse.
LED-draiveri ahel LED-i heleduse juhtimiseks taimeriga 555
LED-draiveri ahel LED-i heleduse juhtimiseks taimeriga 555 saavutatakse tavaliselt toiteallika kiire lülitamisega LED-le, toiteallika ON / OFF-suhte kontrollimisega protsessi abil impulsi laiuse modulatsioon (PWM) . LED-draiveritel on püsiva voolu säilitamiseks sisse ehitatud ka juhtimisahel.

LED-draiveri ahel LED-i heleduse juhtimiseks taimeriga 555
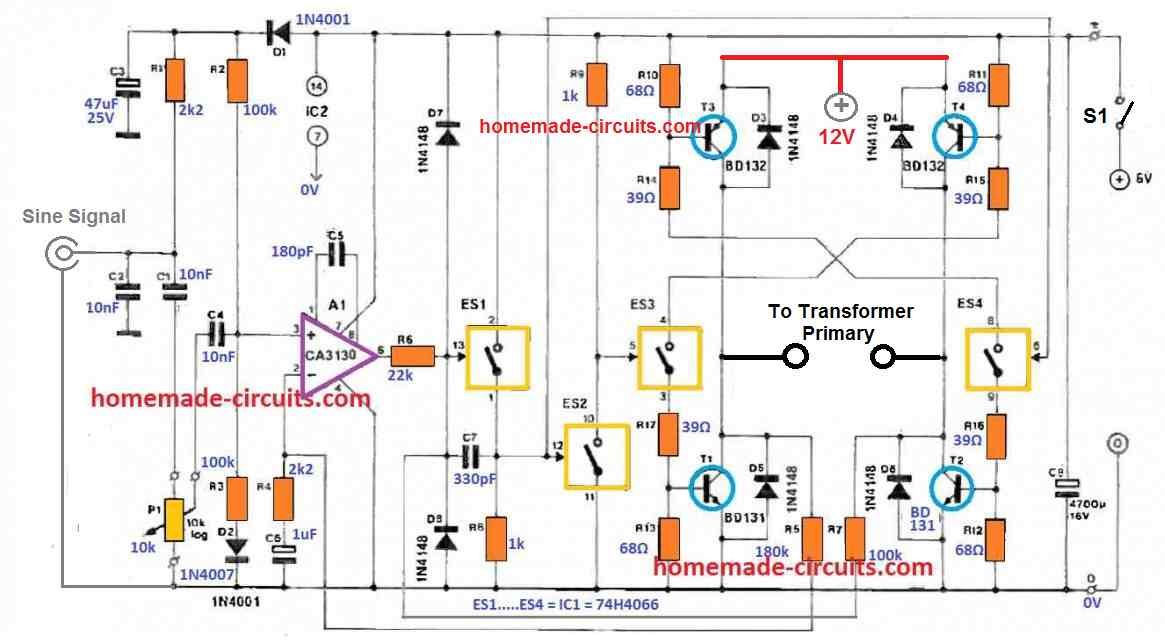
See ülaltoodud vooluahel on loodud a 555 taimer IC . Lülitage vooluahel sisse (5V), kuna 555 IC päästikupoldi pinge on väiksem kui 1/3 Vcc.
Sisendpinge jõuab kondensaatorini läbi 10kΩ potentsiomeeter ja diood D2 nii, et kondensaator hakkab laadima ajakonstandiga RdR1C (kus Rd on dioodi D2 ettepoole suunatud takistus).
Kui kondensaatori pinge ületab 2/3 Vcc, lähtestatakse taimer 555. Siis on väljund null volti. Sel hetkel tühjeneb kondensaator dioodi D1 ja potentsiomeetri R1 kaudu väljundnõela, kuna see on maapotentsiaalis. Kui kondensaatori pinge langeb alla 1/3 Vcc, tõuseb 555 IC väljund taas 5 V-ni. See protsess jätkub.
Siin on laadimis- ja tühjendustee täiesti erinev, kuna see on eraldatud dioodidega D1 ja D2 (vt ülaltoodud pilte). Kui potentsiomeetri keskpunkt on 50% (keskel), saame 50% töötsükli (võrdse impulsi laiusega ruutlained).
Impulsi laiust saab muuta laadimis- ja tühjendusaja muutmisega, see on võimalik potentsiomeetri reguleerimisega. Seega saame PWM-signaali vastavalt meie vajalikule intensiivsusele.
See signaal suunatakse LED-ile 4,7 kΩ takisti kaudu. LED-i heledus on võrdeline ruutlaine keskmise väärtusega. Suure impulsi laiuse jaoks on võimalik saada LED-i tohutu heledus. Kui pulss on madal, väheneb heledus.
Bipolaarsete LED-draiverite rakendused
Mõned LED-draiverite rakendused on:
- Tööstuslik / välisvalgustus
- Tänavavalgustuse automaatne intensiivsuskontroll
- Kommertsvalgustus
- Elamu valgustus
- Mobiiltelefoni kaamera välk
- Autode salongi- või tagatuled
- Kaasaskantav taskulamp / taskulamp
- Märgid
- Lifti valgustus
- LCD taustvalgus
Seega on see kõik seotud bipolaarse LED-draiveri vooluahela kujundusega, selle ehitamisega mikrokontrolleri, taimeri 555 IC ja rakenduste abil. Loodame, et olete sellest teabest paremini aru saanud.
Lisaks sellele võivad kõik selle kontseptsiooniga seotud küsimused elektri- ja elektroonikaprojektid , esitage palun oma väärtuslikud ettepanekud, kommenteerides allolevas kommentaaride osas. Siin on teile küsimus, mis on potentsiomeetri funktsioon LED-dimmeri ahelas?